2024年度JKA補助事業
↑上の画像をクリックすると研究概要が見れます
研究題目
R3アルゴリズムによる量子アニーリングを利用した生産設備配置と
ロボット動作の最適化補助事業
研究内容
-
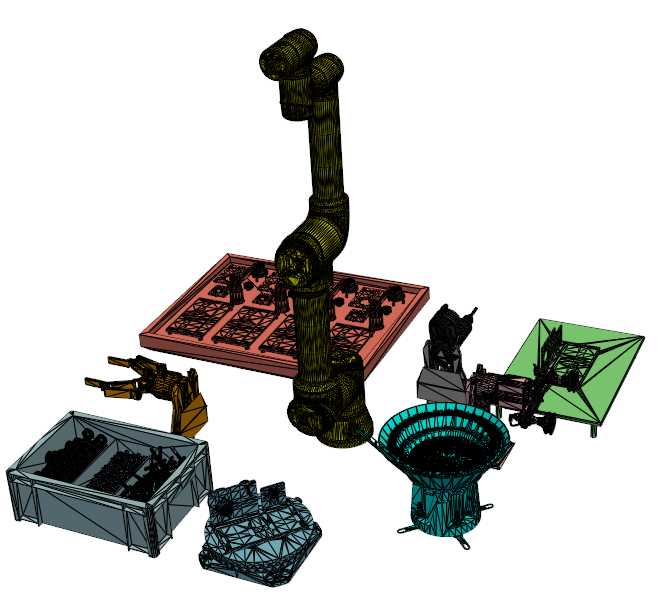
本研究では,量子アニーリングを活用した生産設備配置とロボット動作の同時最適化手法を開発しました.
独自に考案した R3 アルゴリズム(Random Resolution selection for each Region)を発展させることで,障害物周辺領域を適応的に
高解像度化する A3 アルゴリズム(Adaptive Area Awareness)を提案しました.
製造業向け部品組付けシステム(シミュレーション)と食品サービス業向け店舗用調理システム(実機)を用いて本手法を検証し,
D-Wave 社の量子アニーリングマシンによる評価で古典コンピュータ比約 96%の計算時間短縮を達成しました.
研究概要
研究成果
- 三輪隼也,荒井翔悟,"量子アニーリングマシンによるマニピュレータの高速経路計画," SICE Multi-Symposium on Control Systems, 2025.
- 三輪隼也,荒井翔悟,"量子アニーリングを利用したロボットセル生産システムにおけるマニピュレータ経路と設備配置の同時最適化," 日本機械学会ロボティクス・メカトロニクス講演会,2025.
- 三輪隼也,荒井翔悟,"量子アニーリングを利用したロボットセル生産システムにおけるマニピュレータ経路と設備配置の最適化," Robotics Ongoing Breakthroughs 2025.
- 三輪隼也,荒井翔悟,"Optimization of manipulator trajectories and equipment layouts in robot cell production systems using quantum annealing," International Conference on Movement Science and Technology, 2025.
- 三輪隼也,荒井翔悟,"量子ビット数の制約を考慮した量子アニーリングによるロボットセル生産システムにおけるマニピュレータ経路と設備配置の最適化手法の提案," 計測自動制御学会システムインテグレーション部門講演会,2025.
- 山本莉月矢,三輪隼也,平岡恵太朗,荒井翔悟,"量子アニーリングと古典コンピューティングによるセル生産システムにおけるマニピュレータ経路と設備配置の最適化,"日本機械学会関東学生会学生員卒業研究発表講演会,2026.
- 山本莉月矢,平岡恵太朗,荒井翔悟,"Optimization of Manipulator Trajectories and Equipment Layout in a Robotic Cell Production System Using Quantum Annealing within a High-Resolution Search Space," SICE FESTIVAL, 2026(発表予定).
- 平岡恵太朗,荒井翔悟,"量子アニーリングを用いた複数台モバイルマニピュレータによる組立作業の最適化,"日本機械学会ロボティクス・メカトロニクス講演会,2026(発表予定).
謝辞
- この研究は公益財団法人JKAの補助事業として助成を受け実施されました