Research
Takamatsu Laboratory integrates sensing, robotics, and information science to address unmet medical needs in clinical practice. By combining measurement technologies for acquiring biological information, mechanisms and control technologies for safely and intentionally operating devices inside the body, and information processing technologies that connect acquired information to medical decision-making, we aim to create next-generation medical devices that contribute to diagnosis, treatment, and surgical support.
Research Vision
Medical device research and development requires more than simply creating new devices. It is necessary to consider, as an integrated system, how to acquire clinically needed information, how to operate devices safely and intentionally inside the body, and how to connect acquired information to medical decision-making. Takamatsu Laboratory aims to create next-generation medical devices that support medical judgment and procedures through the integration of sensing, robotics, and information science.
In sensing, we acquire biological information that has been difficult to obtain with conventional medical devices through imaging, spectroscopic measurement, chemical analysis, and related techniques. In robotics, we develop mechanisms and control technologies that enable endoscopes, probes, and other devices to operate safely and reproducibly inside the body. In information science, including machine learning, we analyze images, spectral information, analytical data, and device operation data, transforming them into information that supports confident decision-making by medical professionals.
By combining these technologies across disciplines, we propose new means of measurement, operation, and decision support for clinical challenges that are difficult to solve with existing medical devices. From an engineering perspective, we seek flexible solutions to unmet medical needs and aim to contribute to safer and less invasive medicine for patients.
Development of near-infrared hyperspectral imaging endoscopy
In endoscopic diagnosis and endoscopic surgery, there are situations in which it is difficult to make judgments based only on the color and shape of the surgical field surface. Important structures such as lesions, blood vessels, and nerves hidden beneath mucosa or fat may not be sufficiently identifiable using conventional visible-light images alone. New technologies are therefore needed to visualize information inside tissue without relying solely on the experience of the operator.
Near-infrared light can penetrate biological tissue more deeply than visible light and may provide information about structures beneath the surface. Hyperspectral imaging enables spectral information to be acquired from each pixel of an image, allowing differences in tissue composition and state to be analyzed. By combining this information with machine learning, the distribution of lesions and important tissues can potentially be mapped.
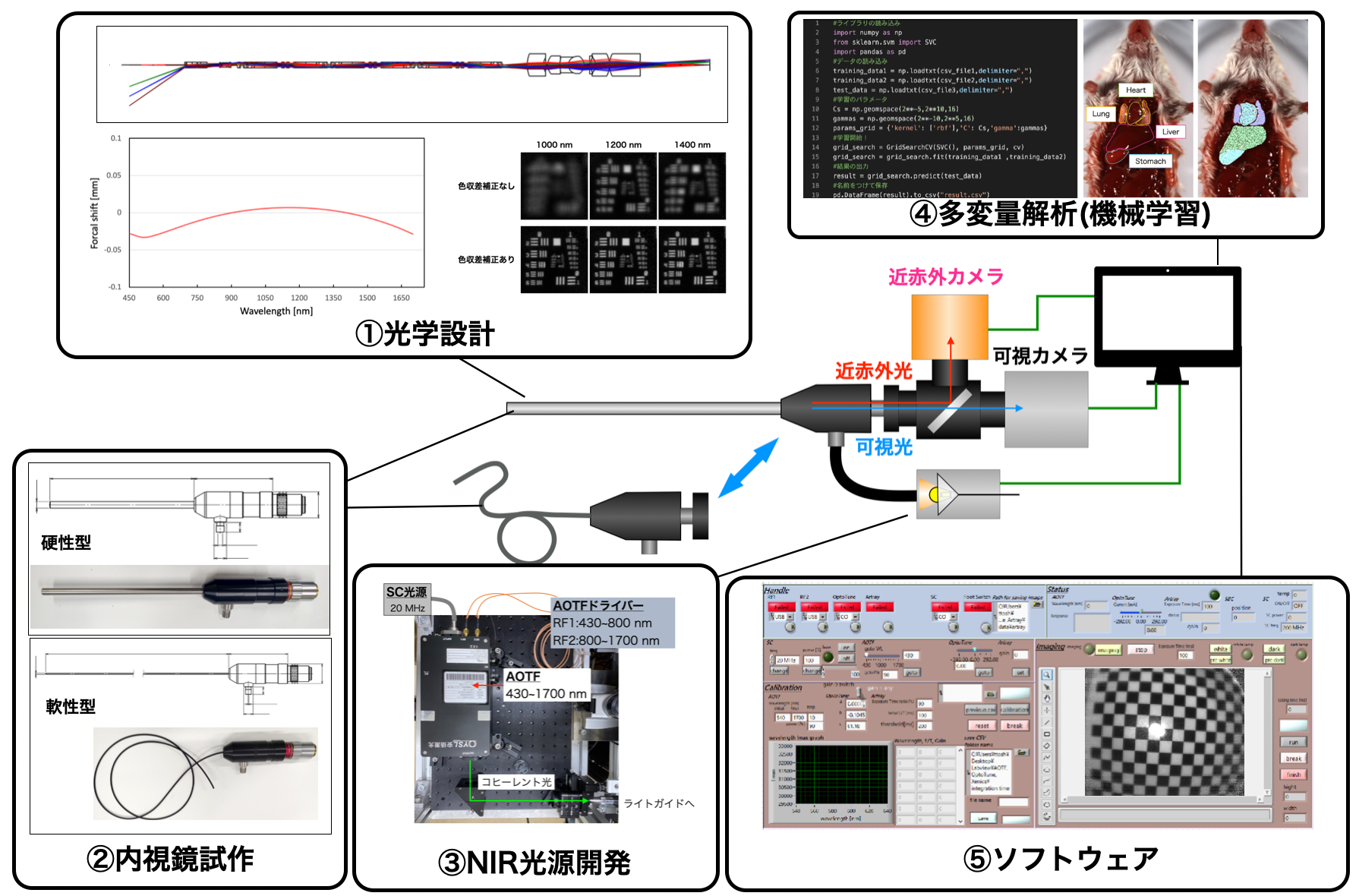
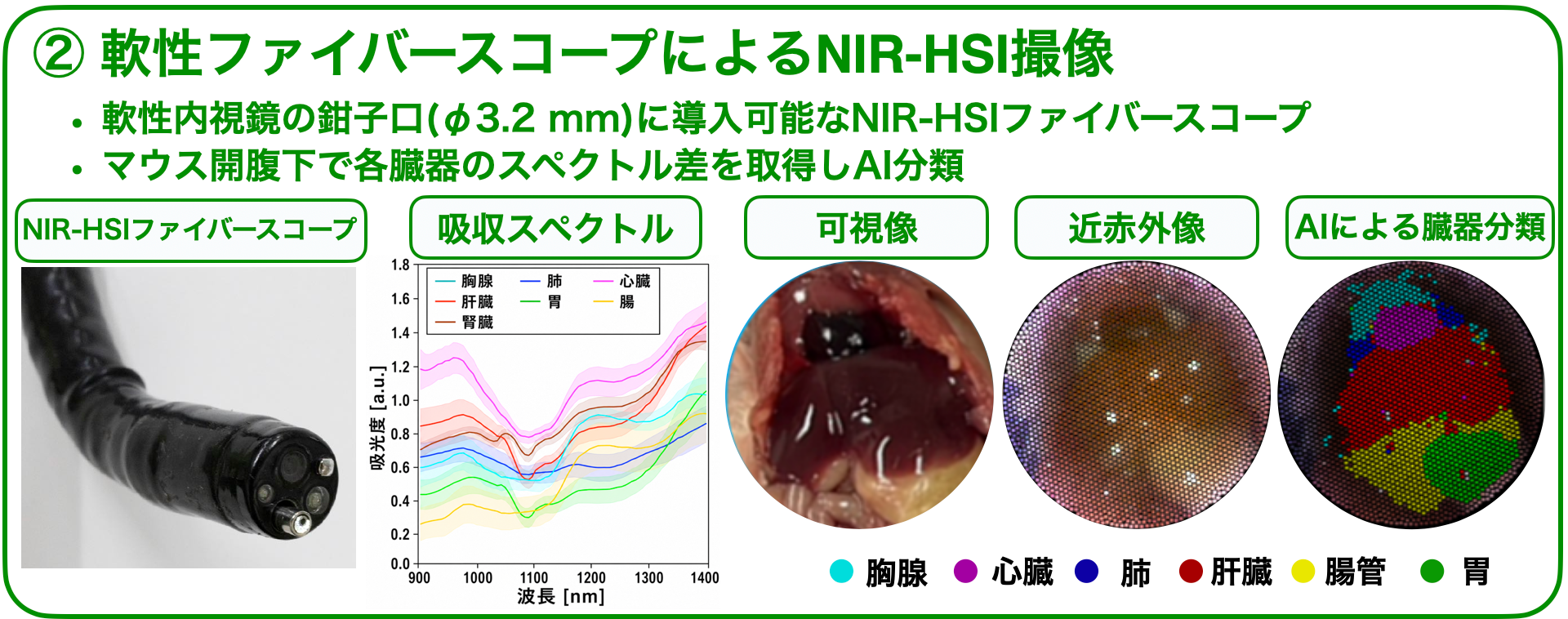
Takamatsu Laboratory focuses on near-infrared wavelengths and is developing near-infrared hyperspectral imaging (NIR-HSI) technologies for endoscopic applications. We develop optical designs, endoscope prototypes, near-infrared light sources, imaging control software, and machine learning analysis as an integrated system to realize endoscopic imaging technologies usable in clinical settings.
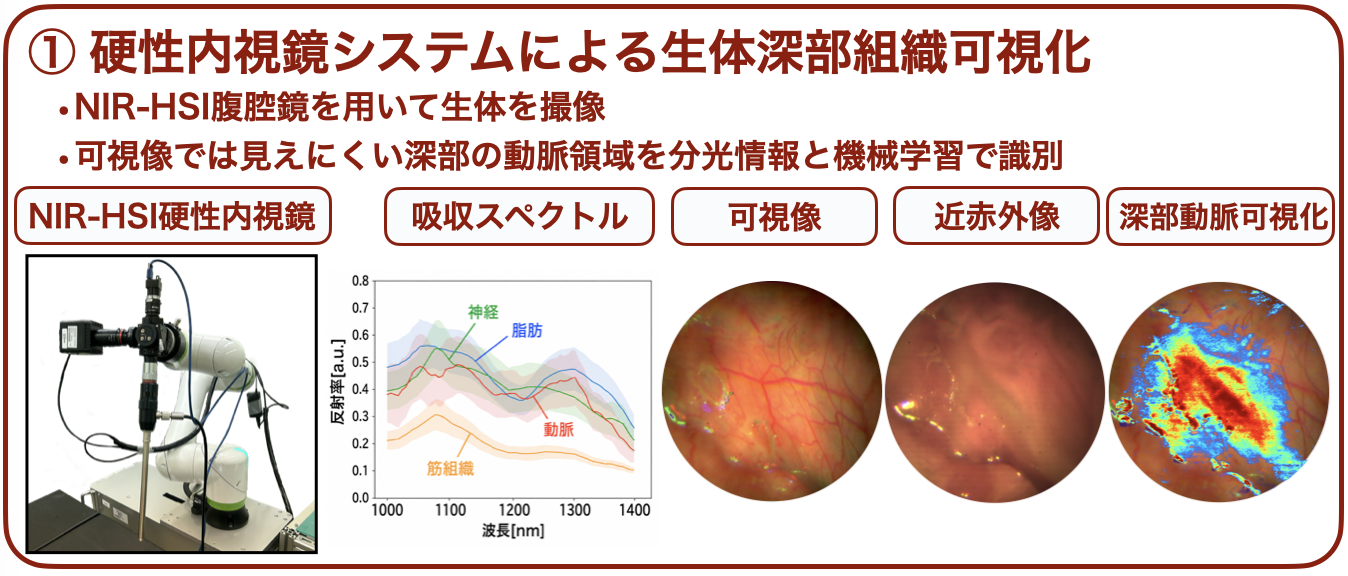
Our work includes deep tissue visualization using rigid endoscopic systems, organ spectral acquisition using flexible fiberscope-type NIR-HSI, and AI-based tissue and organ classification. By capturing deep blood vessels and organ differences that are difficult to recognize with visible light as near-infrared spectral information, we aim to support diagnosis and surgical navigation.
- Development of NIR-HSI systems for rigid and flexible endoscopes
- Visualization of subsurface tissue information by combining visible and near-infrared spectral images
- Tissue and organ classification based on spectral information and AI analysis
- System integration toward diagnostic support and surgical navigation
Outlook: We will further improve implementation as an endoscopic device and develop spectral imaging technologies that can be used in real time during surgery. We aim to advance this technology toward clinical applications as a next-generation endoscopic platform for lesion diagnosis, identification of important tissues, and surgical navigation.
Development of a robotic colonoscope insertion system
Colonoscope insertion requires advanced manipulation that combines tip bending, pushing and pulling, and twisting. In highly flexed sections of the colon, insertion can overstretch the mesentery and cause pain or burden for patients.
Conventional colonoscopy depends on skilled manipulation by physicians to adapt to the shape of the colon. However, acquiring insertion skills requires considerable training, and difficulty varies depending on patient body type and colon anatomy. Although insertion-assist mechanisms and robotic endoscopes have been studied, there remains room to develop simpler mechanisms that can be inserted without excessive stretching of the colon.
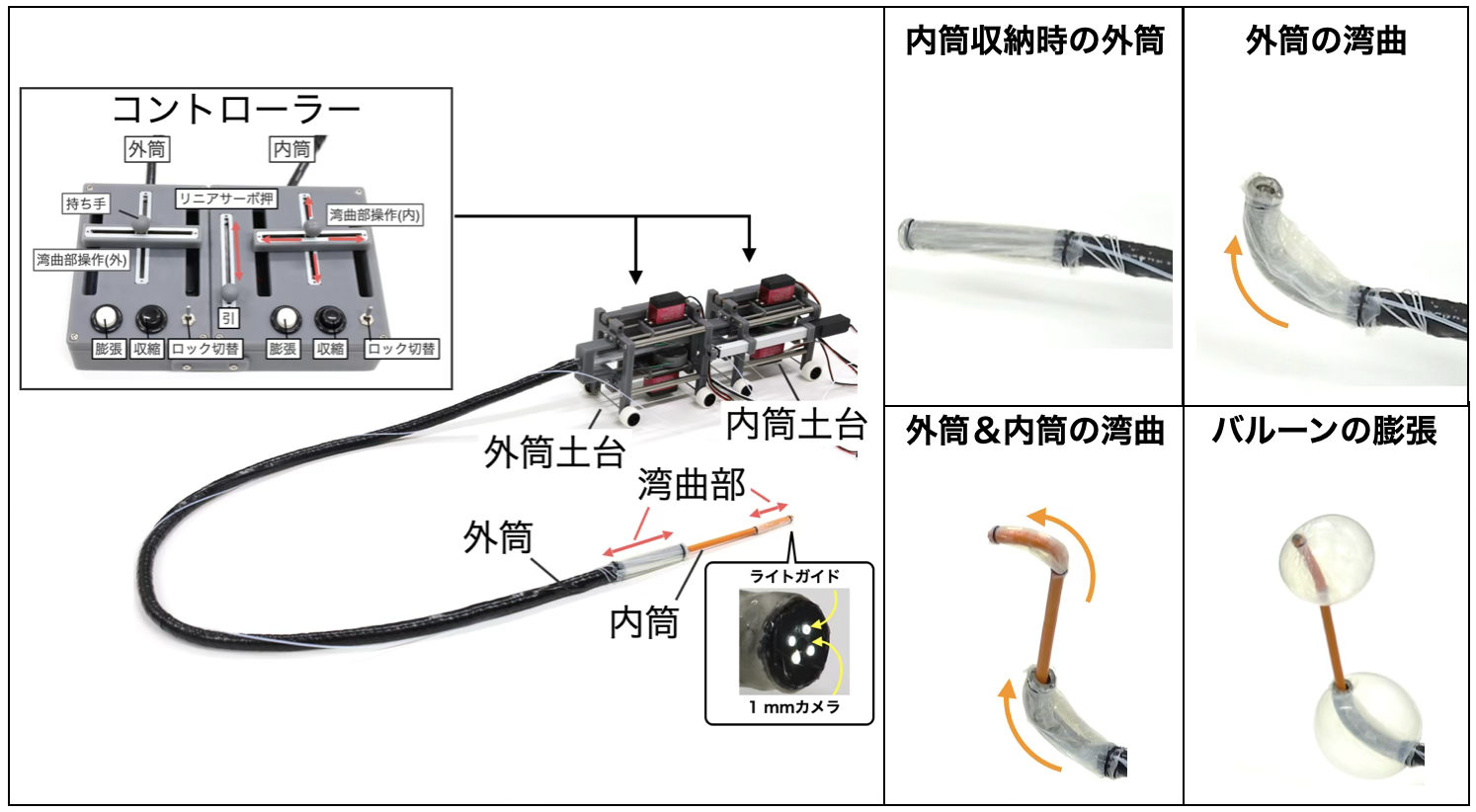
Takamatsu Laboratory is developing a robotic endoscope mechanism based on the concept of double-balloon endoscopy, in which the outer and inner tubes can bend independently. By combining balloon-based fixation of the colon with advancement of the inner tube, the system aims to move forward while adapting to the shape of the colon.
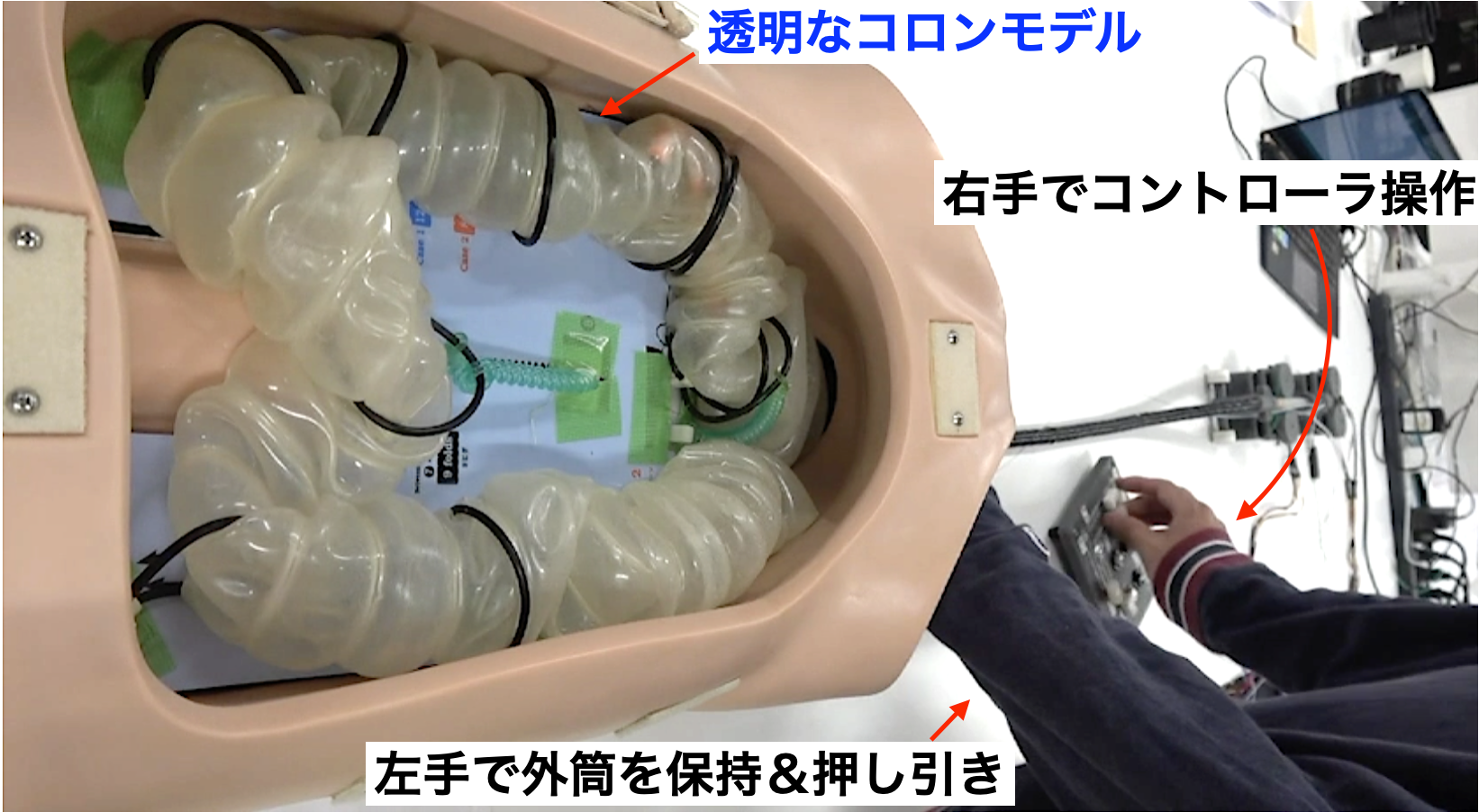
We have evaluated the basic operation of the developed device and its insertion into a colon model. The study confirmed outer- and inner-tube bending, balloon inflation and deflation, inner-tube advancement, and insertion motion in a colon model, demonstrating the potential of an endoscopic mechanism that advances along the colon while suppressing excessive stretching.
- Support for insertion in colonoscopy
- Low-burden insertion mechanism designed to reduce excessive stretching of the colon
- Independent bending of outer and inner tubes and forward motion using double balloons
- Future development toward semi-automated and automated insertion systems
Outlook: We aim to combine direction recognition based on endoscopic images, force and pressure feedback, and robotic control technologies to realize safer and more reproducible colonoscope insertion support. In the future, we will develop automated insertion technologies that reduce the burden on physicians and patients.
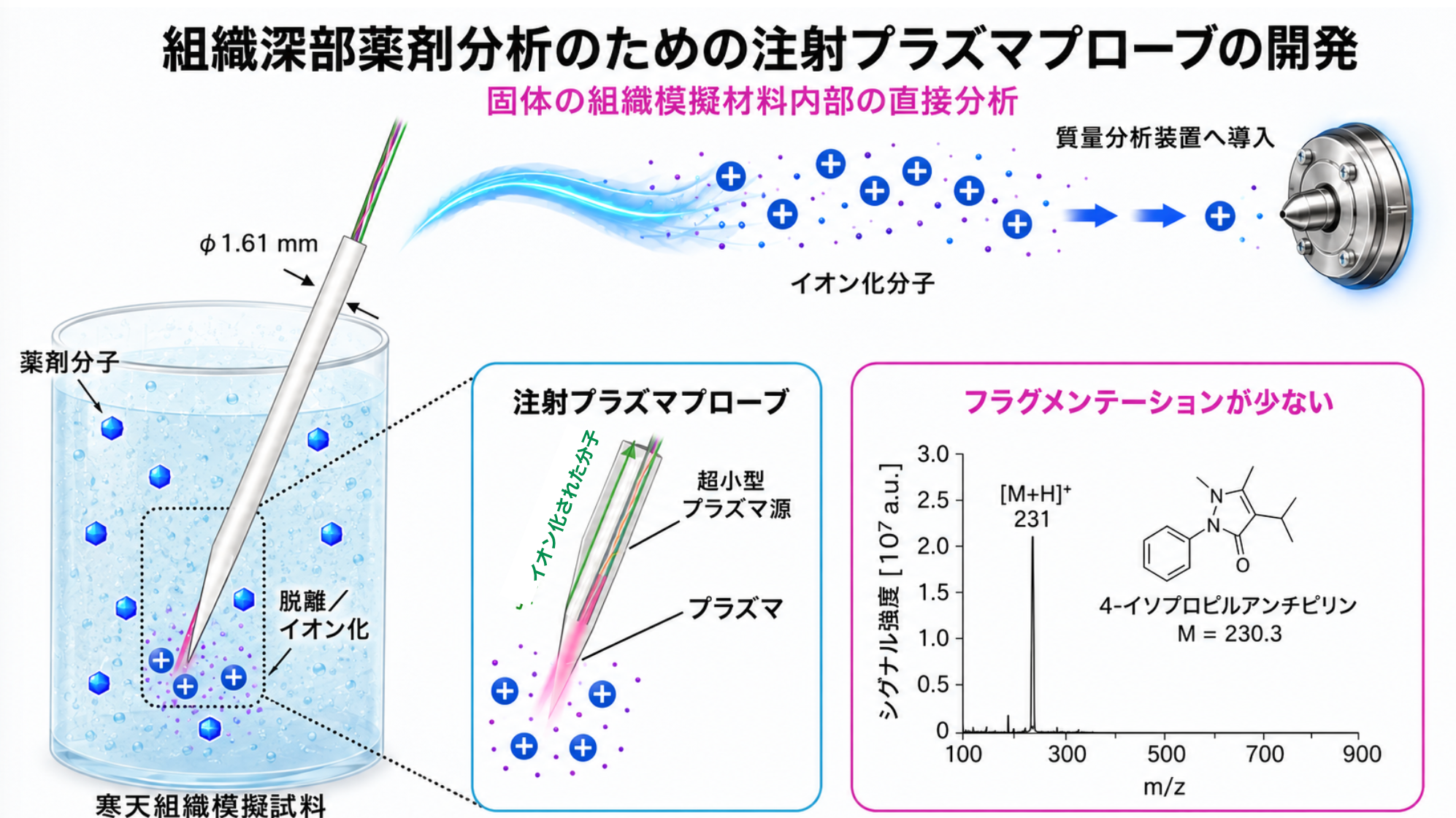
Development of a plasma injection probe for in situ analysis of drug components in deep tissue
Drugs such as anticancer agents exert their therapeutic effects only when they reach the target tissue at an appropriate concentration. However, directly measuring drug concentration at a specific site in the body without removing a large tissue sample is challenging.
Drug distribution has conventionally been evaluated using post-sampling analysis or imaging with labeled drugs. These approaches have limitations in sample amount, real-time capability, and flexibility of measurement location. Technologies are therefore needed to directly and locally analyze drug components at target sites in the body.
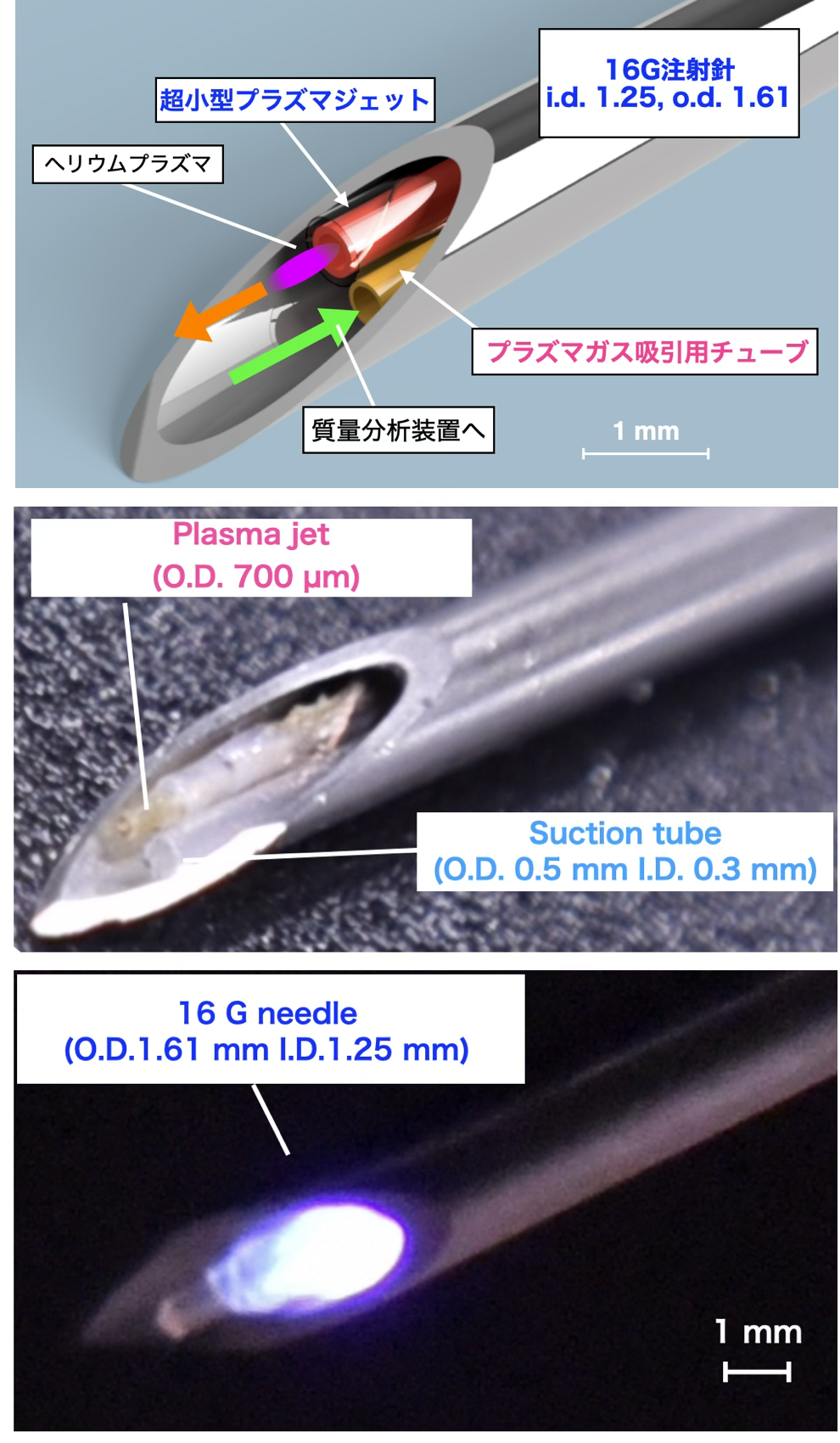
Takamatsu Laboratory has developed a plasma injection probe that integrates a miniature atmospheric-pressure low-temperature plasma source inside an injection needle. The probe desorbs and ionizes drug molecules in tissue at its tip and introduces them into a mass spectrometer, aiming to measure drug components in deep tissue in situ.
In basic validation studies, a miniature plasma source was incorporated into an injection needle and used to detect model drugs in biological tissue phantoms. By adjusting plasma generation gas and suction conditions, we demonstrated the potential for in situ analysis of drug components inside tissue.
- Direct evaluation of drug delivery to deep tissue
- In situ analysis for pharmacokinetic and pharmacodynamic evaluation
- Assessment of local drug distribution without relying solely on biopsy
- Future development toward endoscopic and minimally invasive analytical devices
Outlook: We will further validate the technology using biological tissues and clinically used drugs, developing it into an analytical platform applicable to pharmacokinetic evaluation and prediction of therapeutic effects. Ultimately, we aim to support personalized medicine and optimization of treatment strategies by evaluating delivered drugs directly at lesion sites.