研究内容
髙松研究室では,センシング,ロボティクス,情報科学を統合し,医療現場に残されたアンメットメディカルニーズの解決に取り組んでいます。生体情報を取得する計測技術,デバイスを体内で安全かつ意図通りに動作させる機構・制御技術,取得した情報を医療者の判断につなげる情報処理技術を組み合わせることで,診断・治療・手術支援に貢献する次世代医療機器の創出を目指しています。
研究ビジョン
医療機器の研究開発では,単に新しい装置を作るだけでなく,医療現場で必要な情報をどのように取得するのか,どのようにデバイスを体内で安全かつ意図通りに動作させるのか,得られた情報をどのように医療者の判断へつなげるのかを一体として考える必要があります。髙松研究室では,センシング,ロボティクス,情報科学を統合することで,医療者の判断や手技を工学的に支援する次世代医療機器の創出を目指しています。
センシング技術では,イメージング,分光計測,成分分析などを通じて,従来の医療機器では取得が難しかった生体情報を捉えます。ロボティクス技術では,内視鏡やプローブなどのデバイスを体内で安全かつ再現性高く動作させるための機構・制御技術を開発します。さらに,情報科学や機械学習を用いて,画像,分光情報,分析データ,デバイス動作情報を解析し,医療者がより確信を持って判断できる情報へ変換します。
これらの技術を横断的に組み合わせることで,既存の医療機器では解決が難しい課題に対して,新しい計測・操作・判断支援の手段を提案します。医療現場に残されたアンメットメディカルニーズに対して,工学の視点から柔軟に解決策を構想し,患者にとってより低侵襲で安全な医療の実現に貢献することを目指しています。
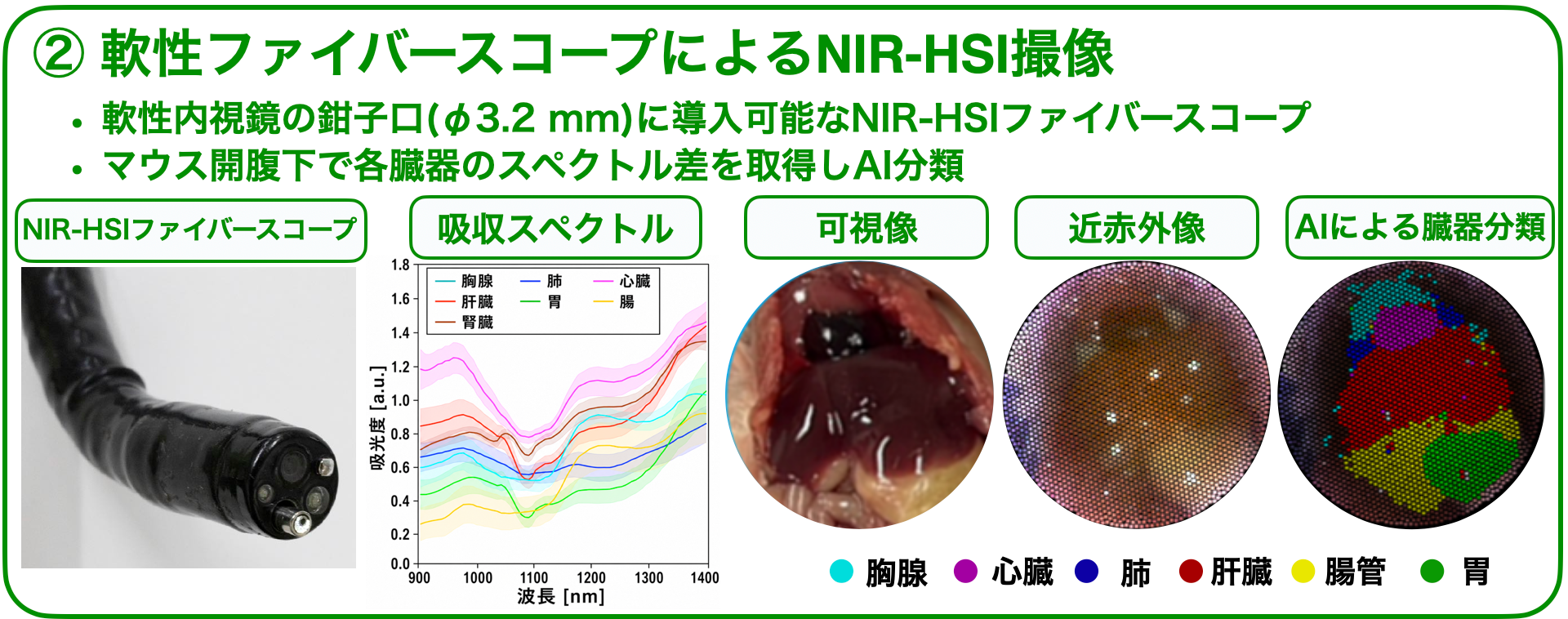
近赤外ハイパースペクトラルイメージング内視鏡の開発
内視鏡診断や内視鏡外科手術では,術野表面の色や形だけでは判断が難しい場面があります。特に,粘膜や脂肪の下に隠れた病変,血管,神経などの重要構造は,通常の可視画像だけでは十分に識別できないことがあります。そのため,術者の経験に依存せず,組織内部の情報を可視化する新しい技術が求められています。
近赤外光は可視光よりも生体組織の内部へ届きやすく,表面下に存在する構造の情報を取得できる可能性があります。また,ハイパースペクトラルイメージングを用いることで,画像の各画素から分光情報を取得し,組織の成分や状態の違いを解析できます。さらに,機械学習と組み合わせることで,取得した分光情報をもとに,病変や重要組織の分布をマッピングすることが期待されます。
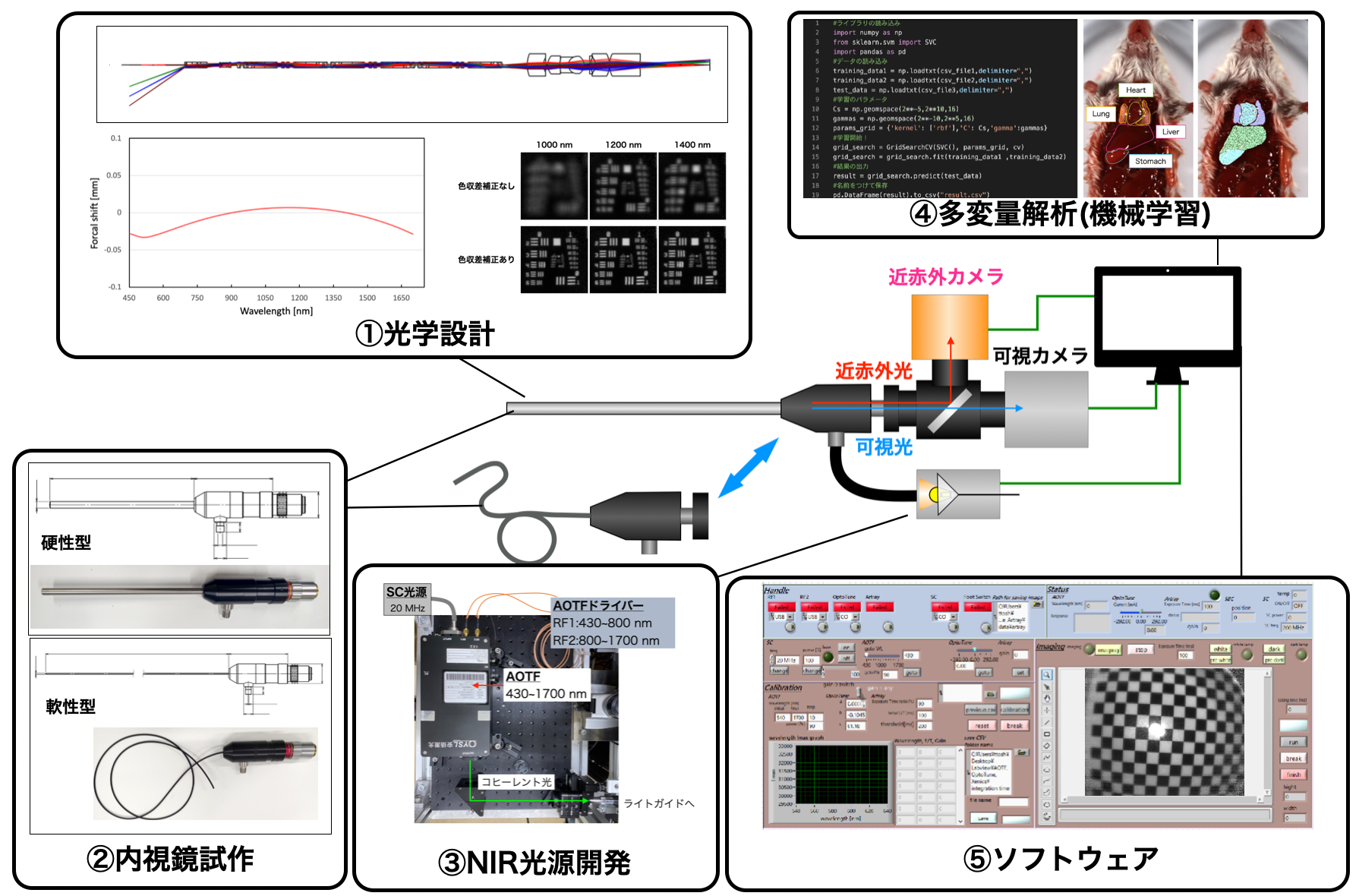
髙松研究室では,1000〜1600 nmの近赤外波長に注目し,近赤外ハイパースペクトラルイメージング(NIR-HSI)を内視鏡へ実装するための研究を進めています。光学設計,内視鏡試作,近赤外光源,撮像制御ソフトウェア,機械学習解析までを一体として開発し,医療現場で利用可能な内視鏡型イメージングシステムの実現を目指しています。
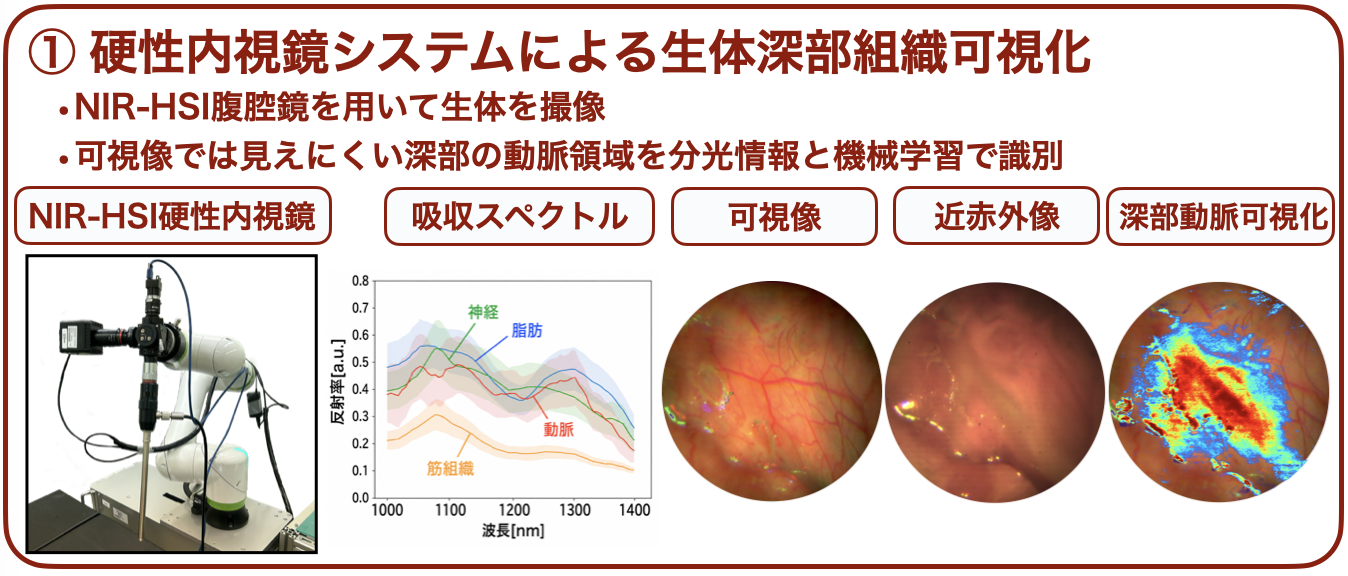
これまでに,硬性内視鏡システムによる生体組織の深部可視化,軟性ファイバースコープ型NIR-HSIによる臓器スペクトルの取得,AI解析による組織・臓器分類に取り組んできました。可視光では認識しにくい深部血管や臓器差を近赤外分光情報として捉えることで,診断支援や手術ナビゲーションへの応用を目指しています。
- 硬性内視鏡・軟性内視鏡に対応したNIR-HSIシステムの開発
- 可視画像と近赤外分光画像を組み合わせた深部組織情報の可視化
- スペクトル情報とAI解析に基づく組織・臓器分類
- 診断支援・手術ナビゲーションへ向けた統合システム化
展望:今後は,内視鏡デバイスとしての実装性を高めながら,術中にリアルタイムで利用できる分光イメージング技術へ発展させていきます。病変診断,重要組織の同定,手術ナビゲーションを支援する次世代内視鏡技術として,臨床応用を見据えた研究開発を進めます。
大腸自動挿入内視鏡の開発
大腸内視鏡の挿入では,先端湾曲,押し引き,捻りなどを複合的に用いる高度な操作が必要です。特に屈曲の強い腸管では,挿入時に腸間膜が過伸展され,患者の疼痛や検査負担につながることがあります。
従来の大腸内視鏡は,医師の熟練した操作によって腸管形状に対応しています。しかし,挿入技術の習得には時間を要し,患者の体格や腸管形状によって操作の難易度も大きく変化します。これまでにも挿入支援機構やロボット内視鏡の研究が進められてきましたが,腸管を過度に伸ばさず,簡便に挿入できる機構にはまだ発展の余地があります。
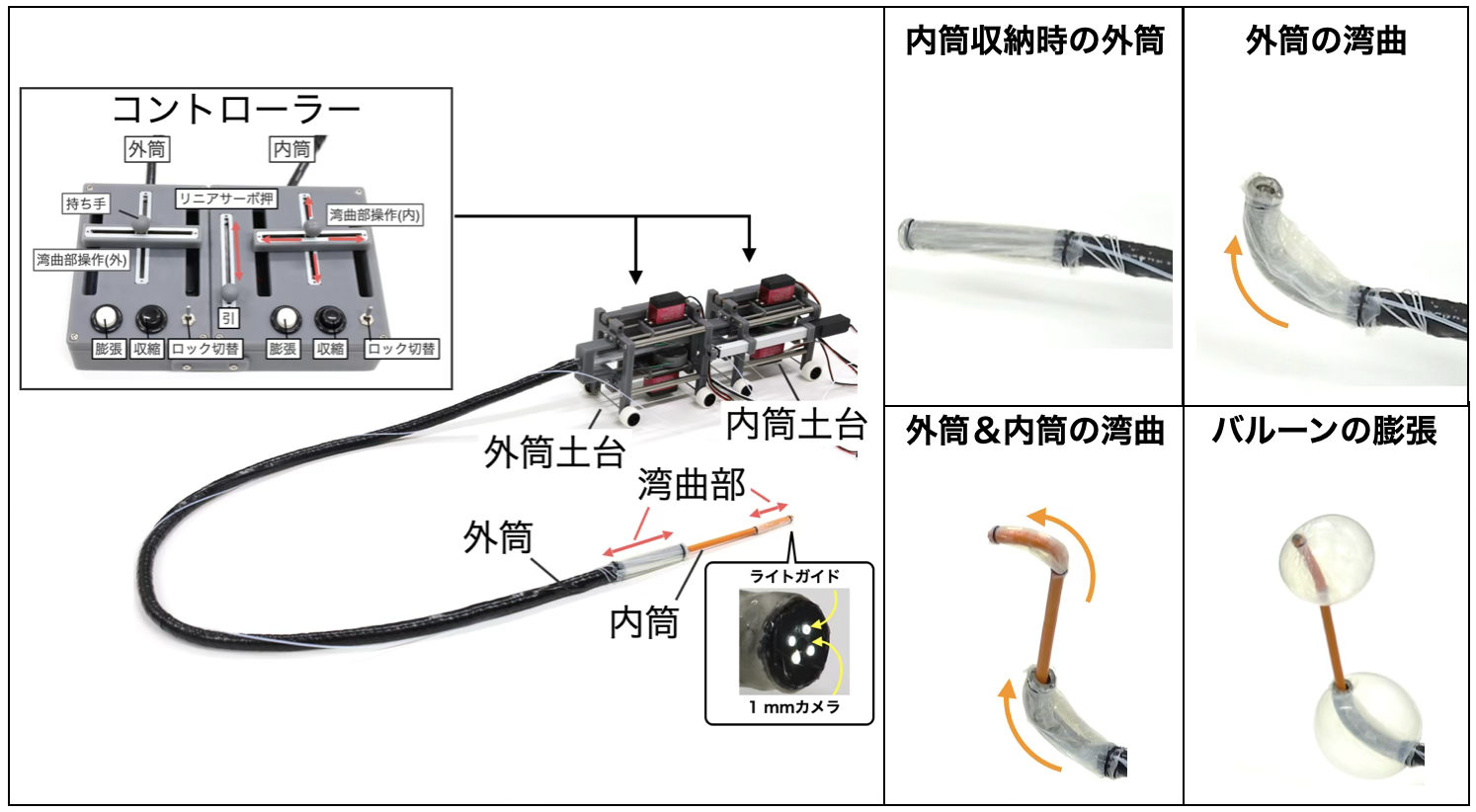
そこで髙松研究室では,ダブルバルーン内視鏡の考え方を基盤として,外筒と内筒がそれぞれ独立して湾曲するロボット内視鏡機構を開発しています。バルーンによる腸管固定と内筒の押し出しを組み合わせることで,腸管の形状に追従しながら挿入することを目指しています。
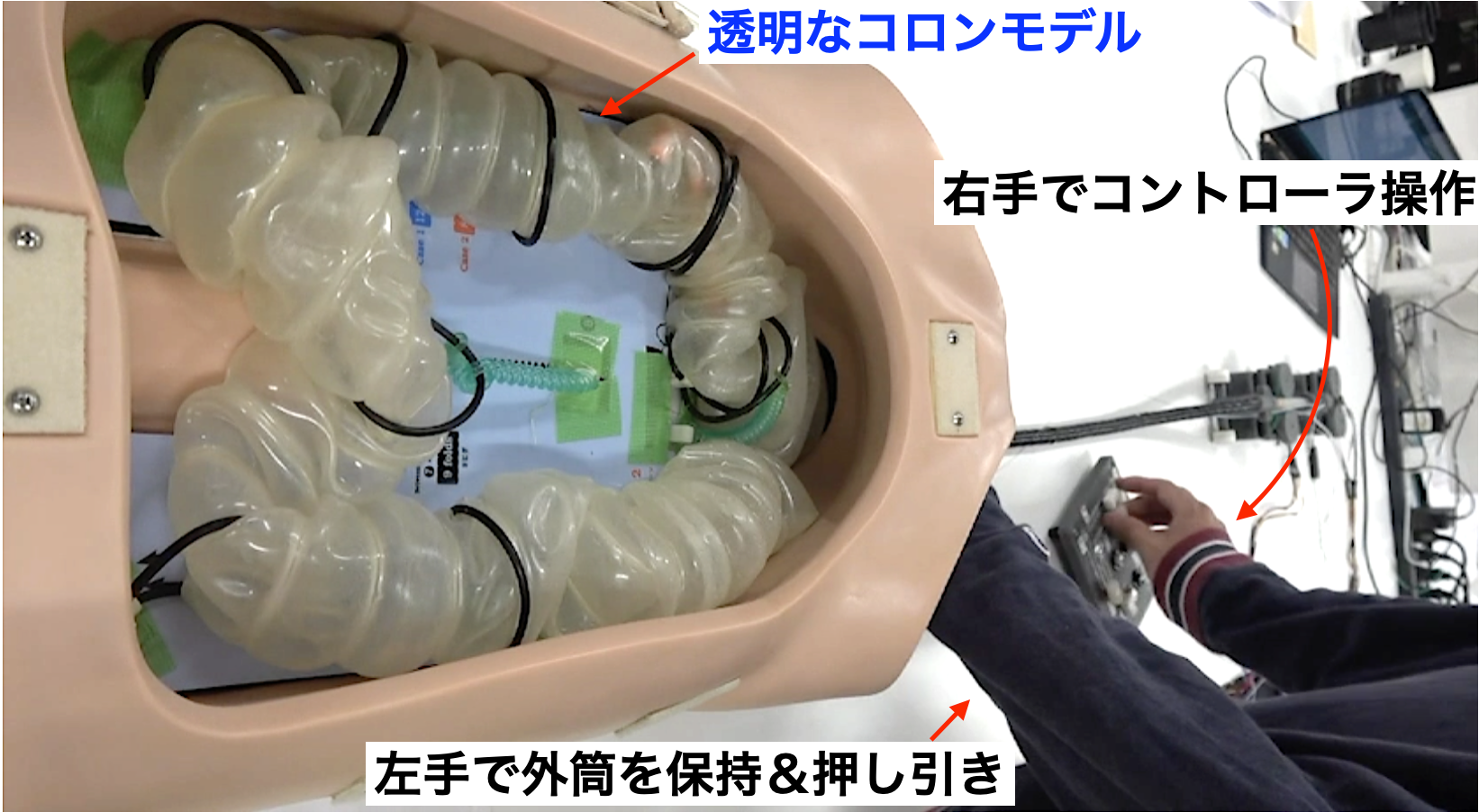
これまでに,開発したデバイスの基本動作とコロンモデルへの挿入を検証しています。論文内では,外筒・内筒の湾曲,バルーンの膨張・収縮,内筒の押し出しといった基本動作に加えて,コロンモデル内での挿入動作を確認しています。これにより,腸管の過伸展を抑えながら,腸管形状に沿って進む内視鏡機構の可能性を示しています。
- 大腸内視鏡検査における挿入操作の支援
- 腸管過伸展を抑えた低負担な挿入機構
- 外筒・内筒の独立湾曲とダブルバルーンによる前進
- 将来的な半自動・自動挿入システムへの展開
展望:今後は,内視鏡画像に基づく進行方向の認識,力覚・圧力情報のフィードバック,ロボット制御技術を組み合わせることで,より安全で再現性の高い大腸内視鏡挿入支援を目指します。将来的には,医師の負担を軽減し,患者にやさしい内視鏡検査を実現するための自動挿入技術へ発展させていきます。
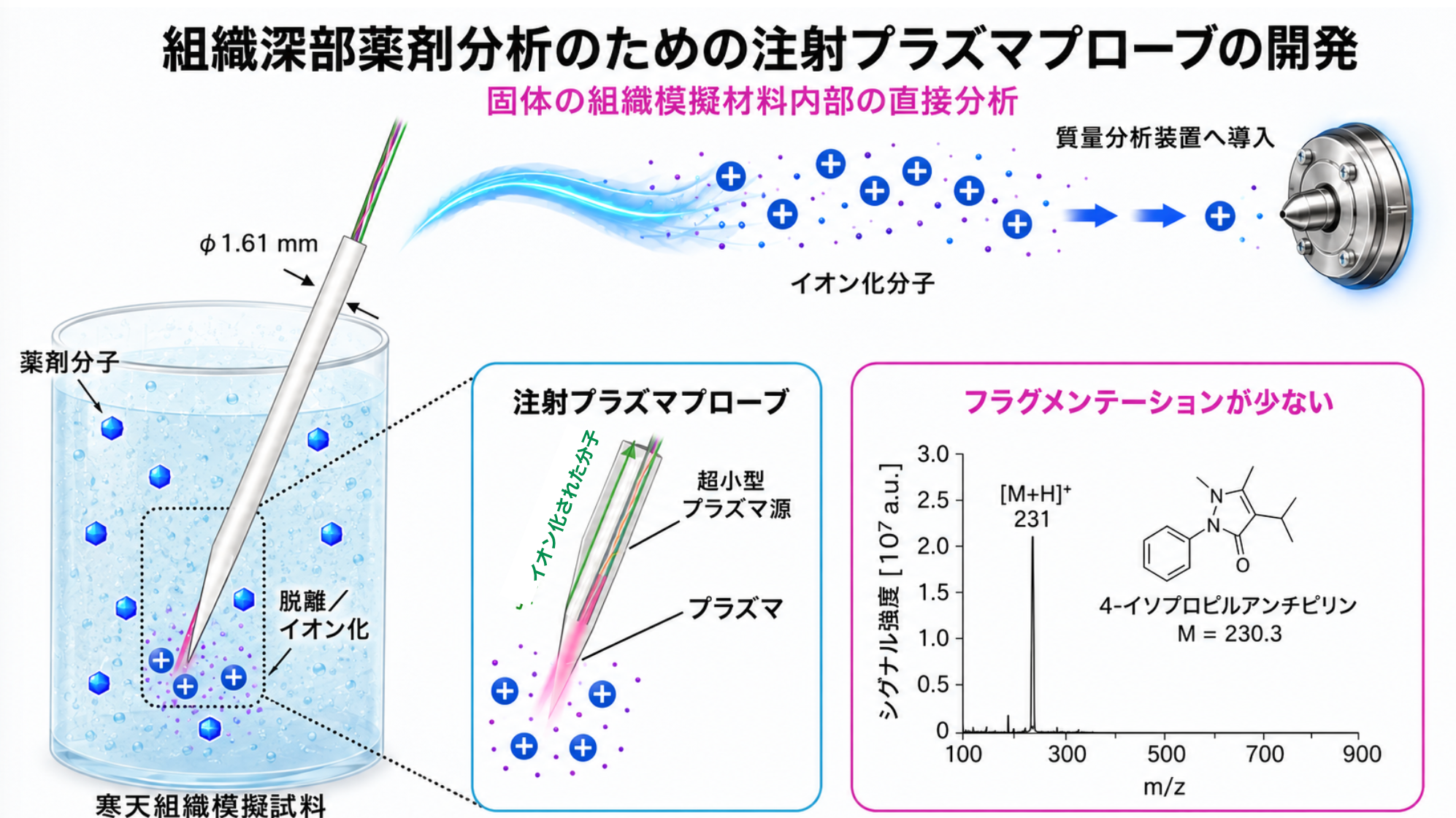
組織深部の薬剤成分をin situ計測する注射プラズマプローブの開発
抗がん剤などの薬剤は,標的組織に適切な濃度で到達して初めて十分な治療効果を発揮します。一方で,生体内の特定部位における薬剤濃度を,組織を大きく採取せずにその場で直接測定することは容易ではありません。
従来は,組織採取後の分析や,標識薬剤を用いたイメージングなどによって薬剤分布を評価してきました。しかし,採取できる組織量には限りがあり,リアルタイム性や測定位置の自由度にも課題があります。そのため,生体内の目的部位において,薬剤成分を直接かつ局所的に分析する技術が求められています。
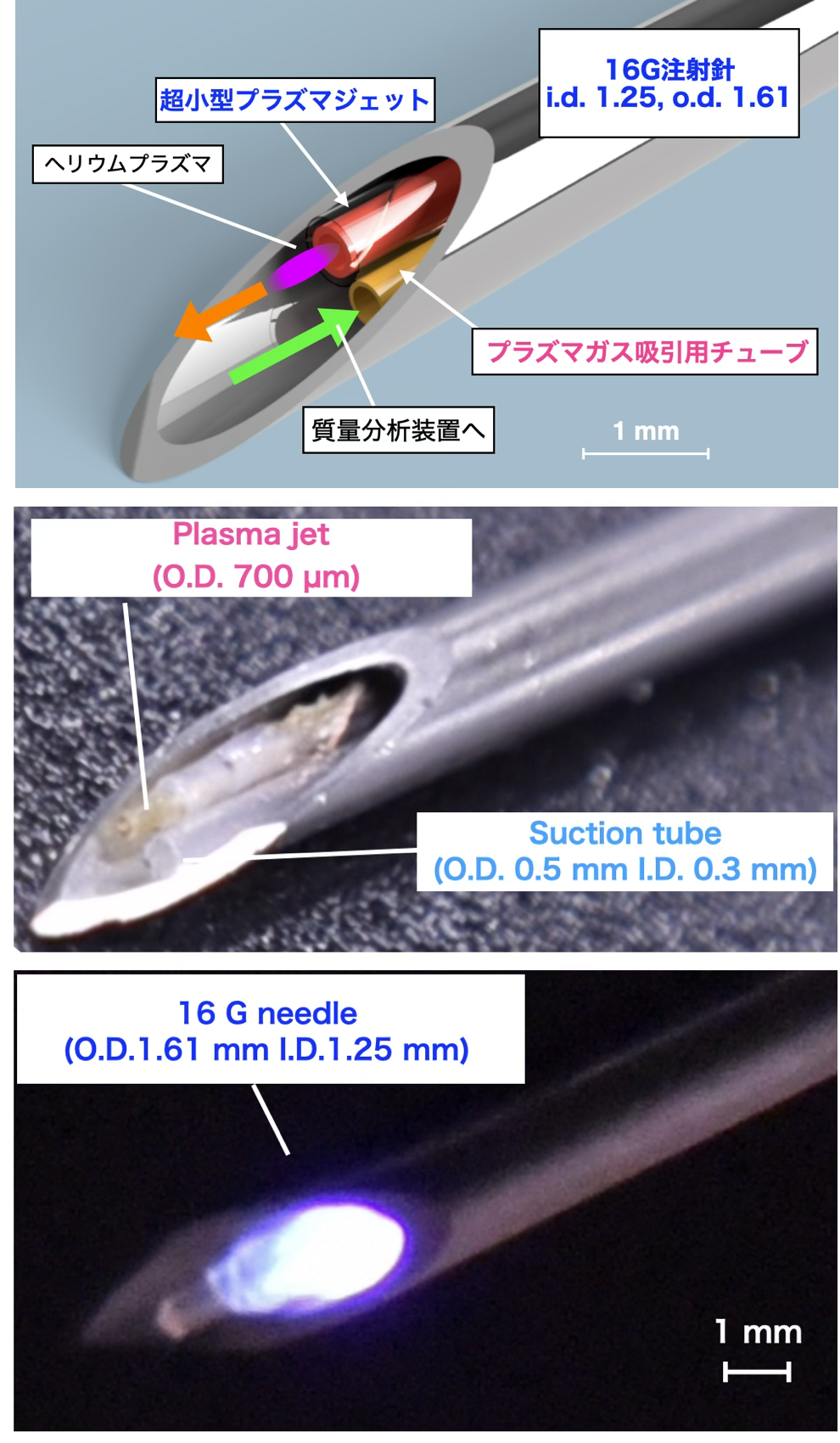
そこで髙松研究室では,注射針の内部に超小型の大気圧低温プラズマ源を搭載した「注射プラズマプローブ」を開発しました。プローブ先端で組織内の薬剤分子を脱離・イオン化させ,質量分析装置へ導入することで,組織深部の薬剤成分をin situに計測することを目指しています。
これまでの基礎検証では,超小型プラズマ源を注射針内に組み込み,生体組織模擬試料中のモデル薬剤を検出しました。また,プラズマ生成ガスや吸引条件を調整することで,組織内部の薬剤成分をその場で分析できる可能性を示しています。
- 組織深部における薬剤到達性の直接評価
- 薬物動態や薬効評価のためのin situ分析
- 生検に依存しない局所薬剤分布の評価
- 将来的な内視鏡下・低侵襲分析デバイスへの展開
展望:今後は,実際の生体組織や臨床で使用される薬剤を対象とした検証を進め,薬物動態評価や治療効果予測に応用可能な分析技術へ発展させていきます。将来的には,病変部に届いた薬剤をその場で評価し,個別化医療や治療戦略の最適化を支援する医療機器技術を目指します。