Research Topics
Currently, our research focuses on the following topics.
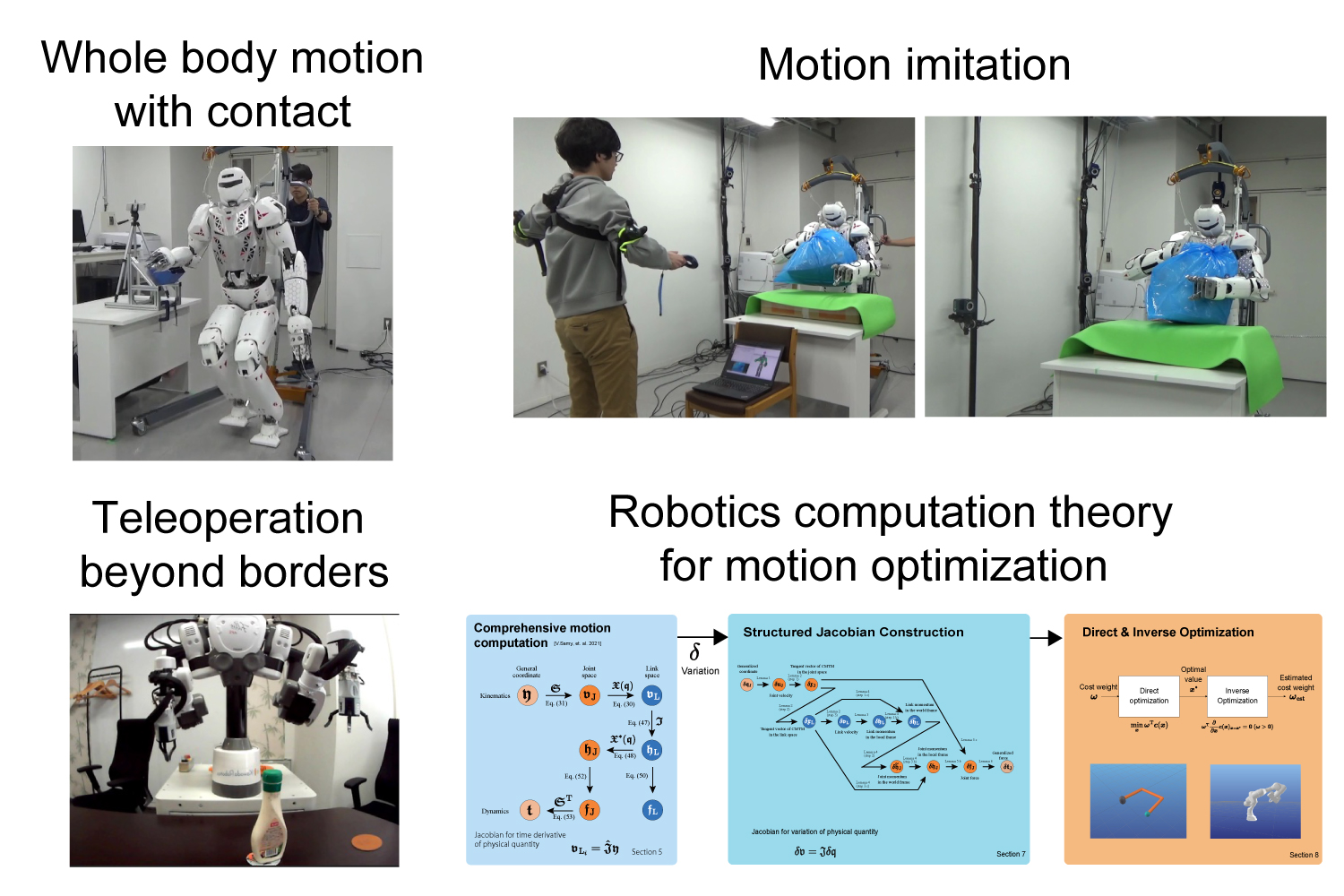
Robot Motion Control
We study robot control through interaction with humans and environments, ranging from motion computation theory to contact-rich motion, human motion imitation, and teleoperation.
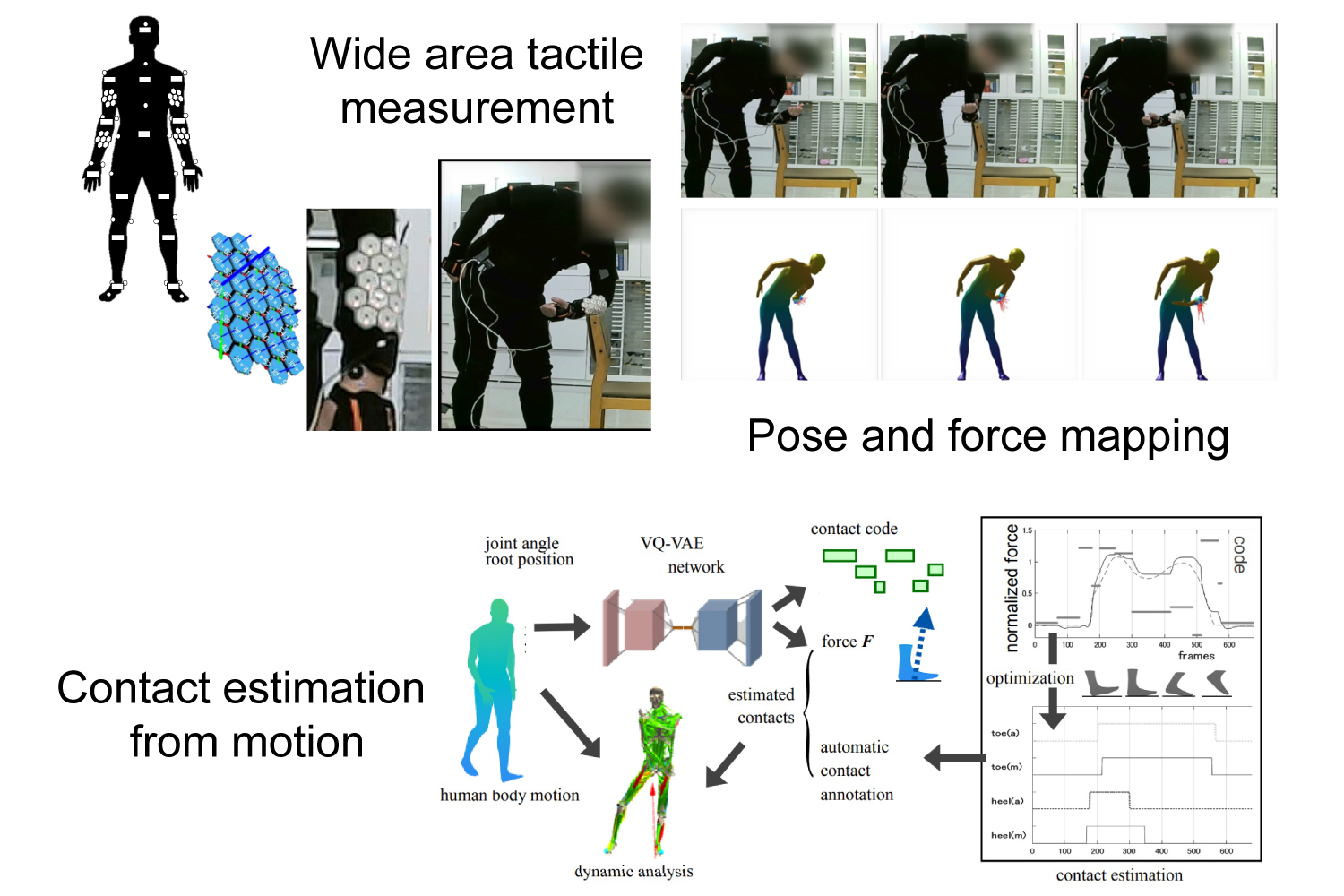
Human Measurement and Analysis
We study human daily movements, especially contact-rich motions, and apply the findings from motion analysis to robot control.
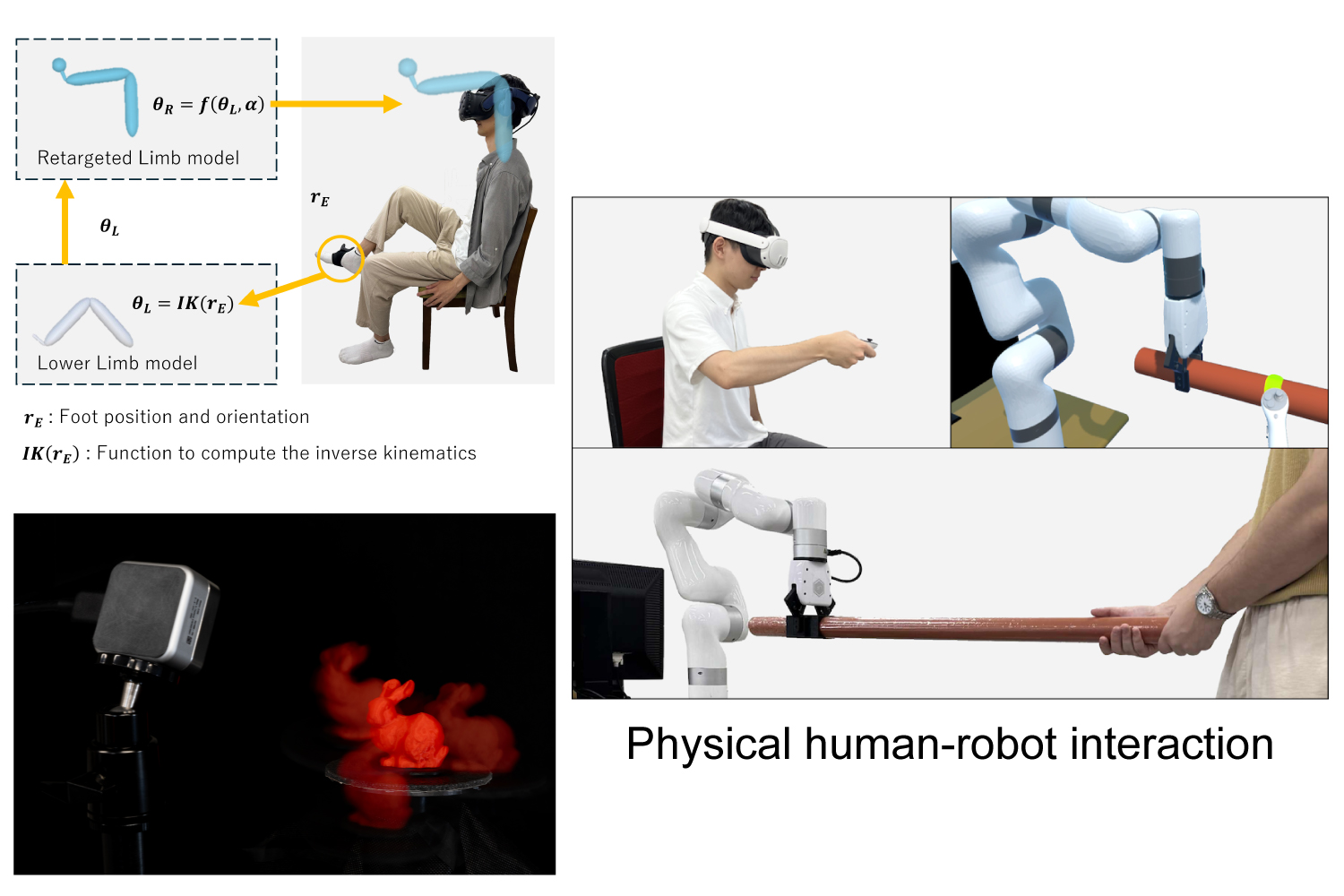
Human Interface
From the perspectives of VR technology and interaction design, we research human-robot interaction for supporting daily life and augmenting human capabilities.