研究テーマ
現在は、次のようなテーマで研究に取り組んでいます。今後さらに発展させていく計画です。
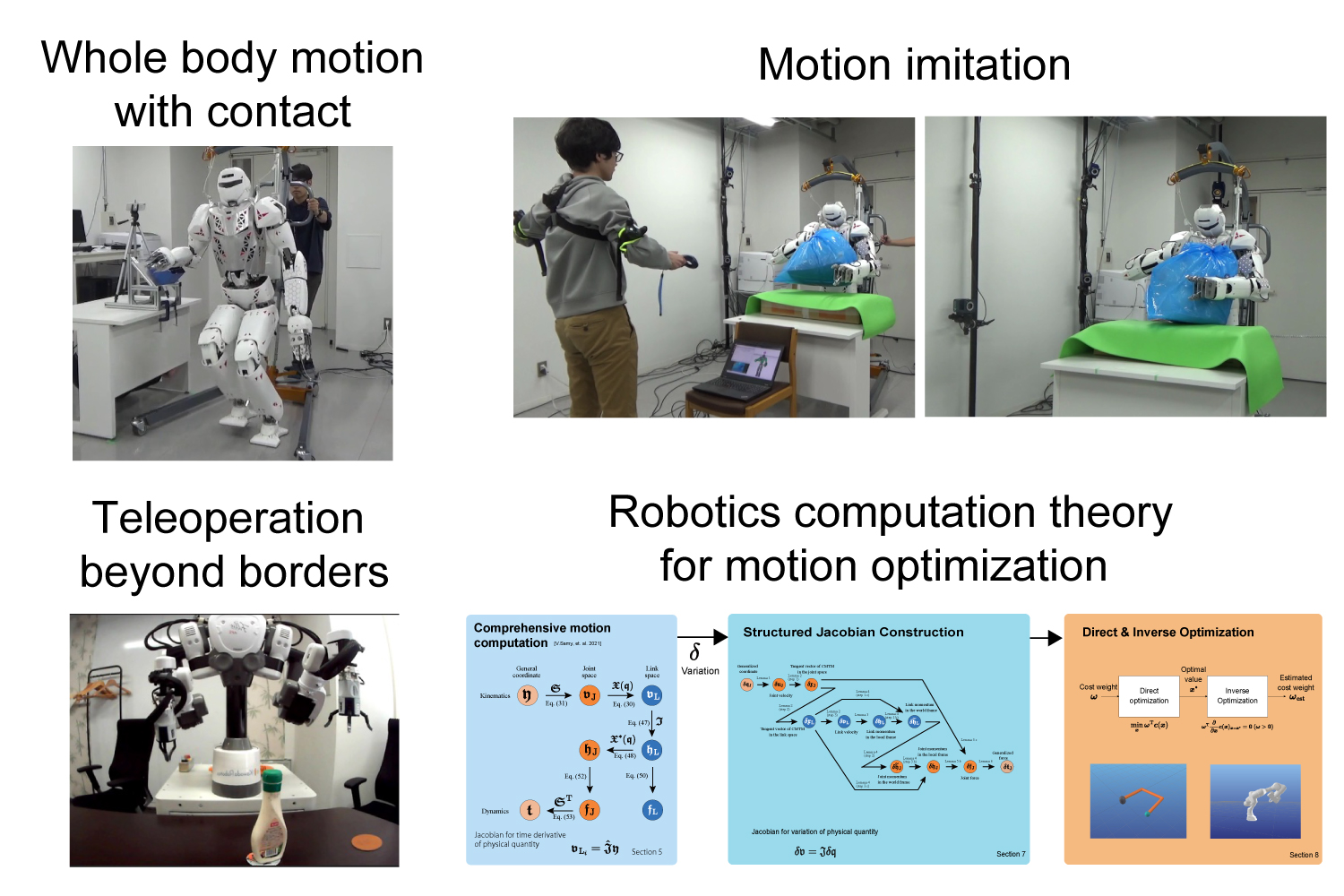
ロボット運動制御
運動計算理論から、接触運動、人間運動模倣、テレオペレーションまで環境やヒトとのインタラクションによってロボットを制御する研究を行っています。
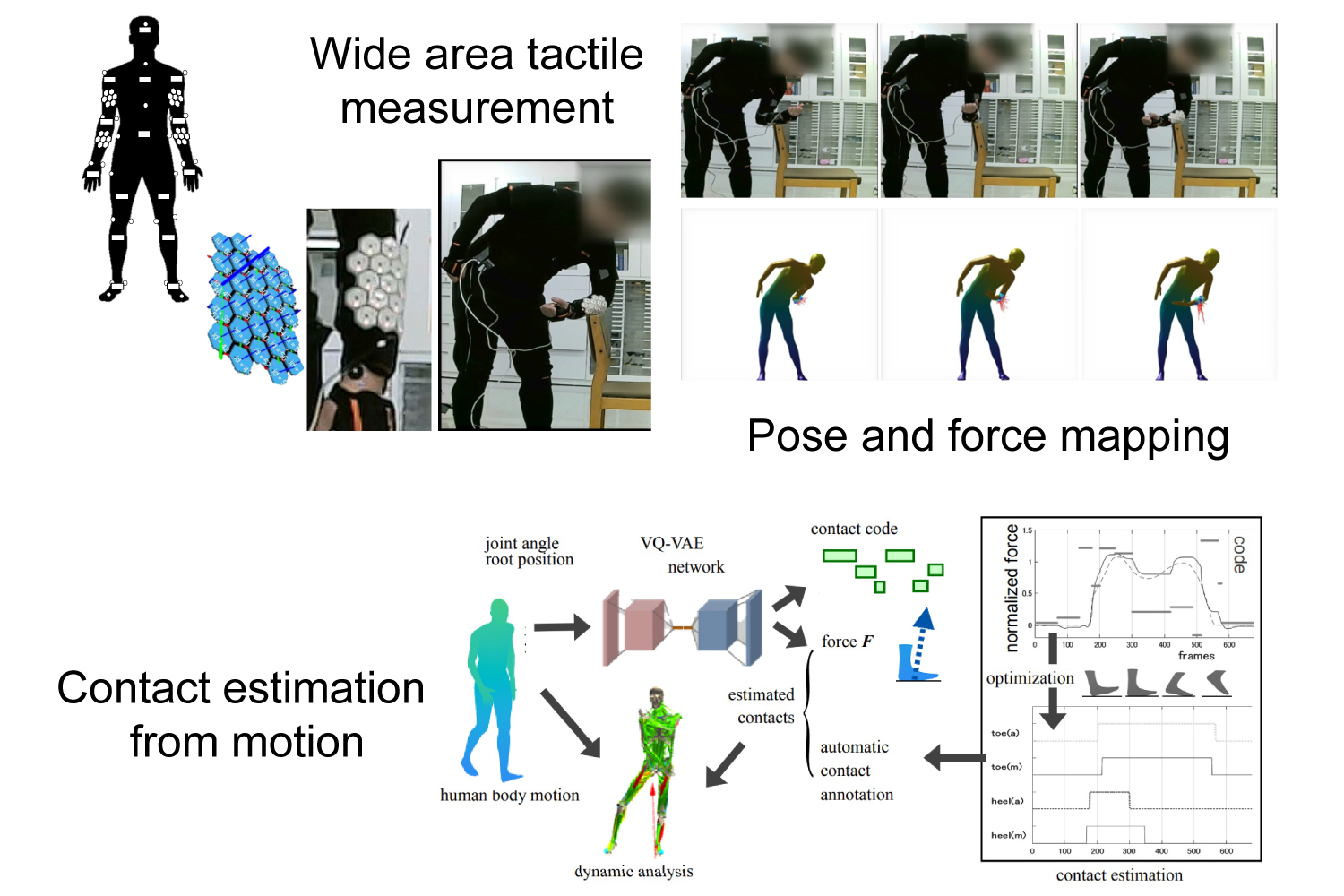
人間測定解析
人間の日常動作、特に接触を伴う運動を対象として、その解析とロボットへの応用に関する研究を行っています。
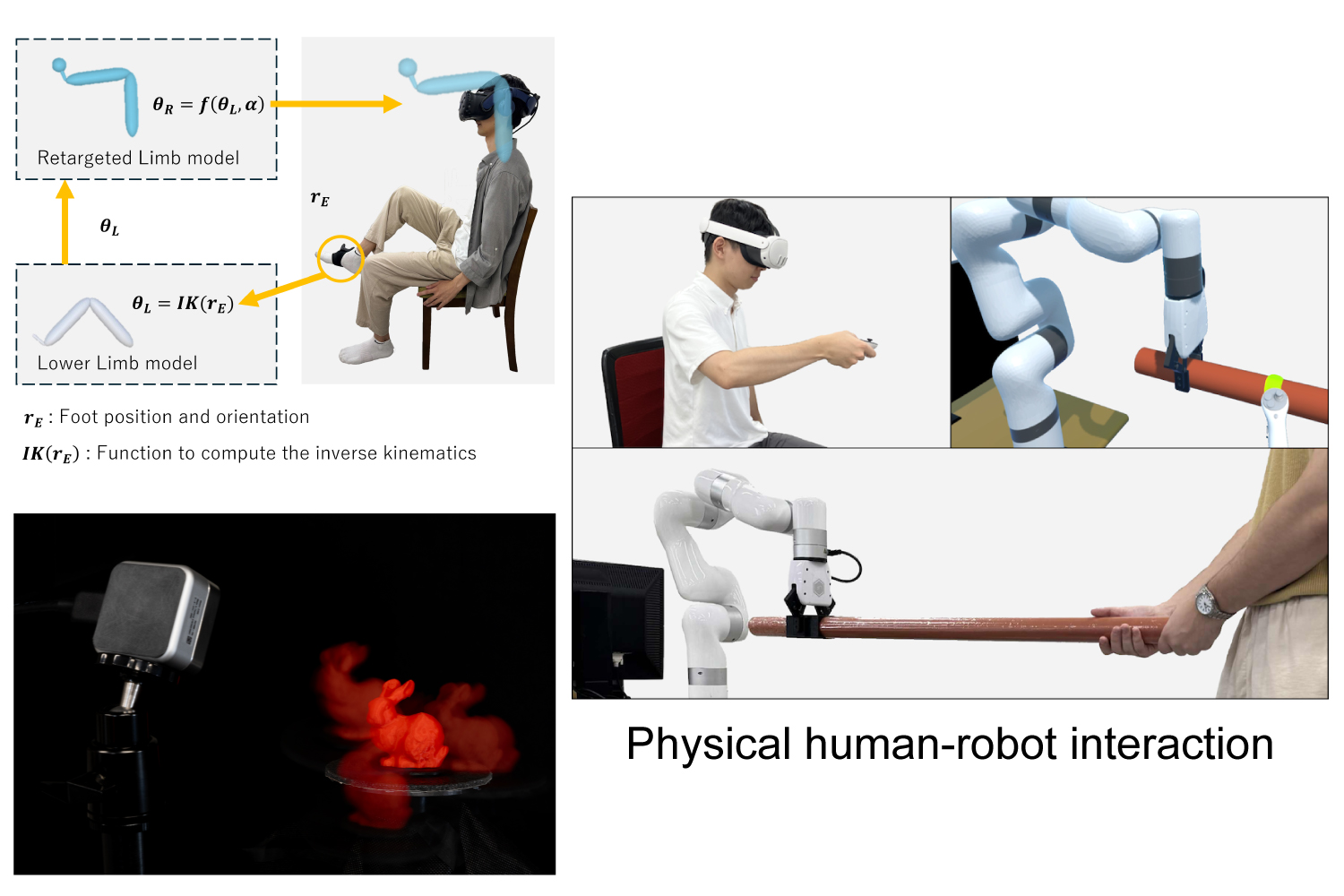
ヒューマンインターフェース
VR技術の活用やインタラクション設計の観点から、生活支援や能力の拡張を目的とした人間とロボットの相互作用に関する研究を行っています。