Research Content
Project in the laboratory
This is a summary of the projects currently being worked on in our laboratory.
You can see more detailed explanation by clicking the image.
 |
 |
 |
|---|---|---|
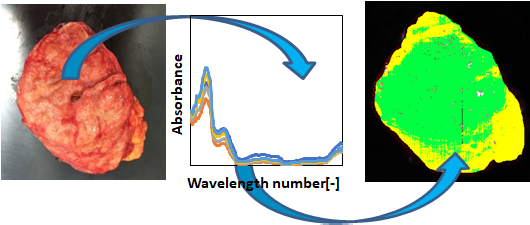
| Development of an endoscopic device using near infrared light |
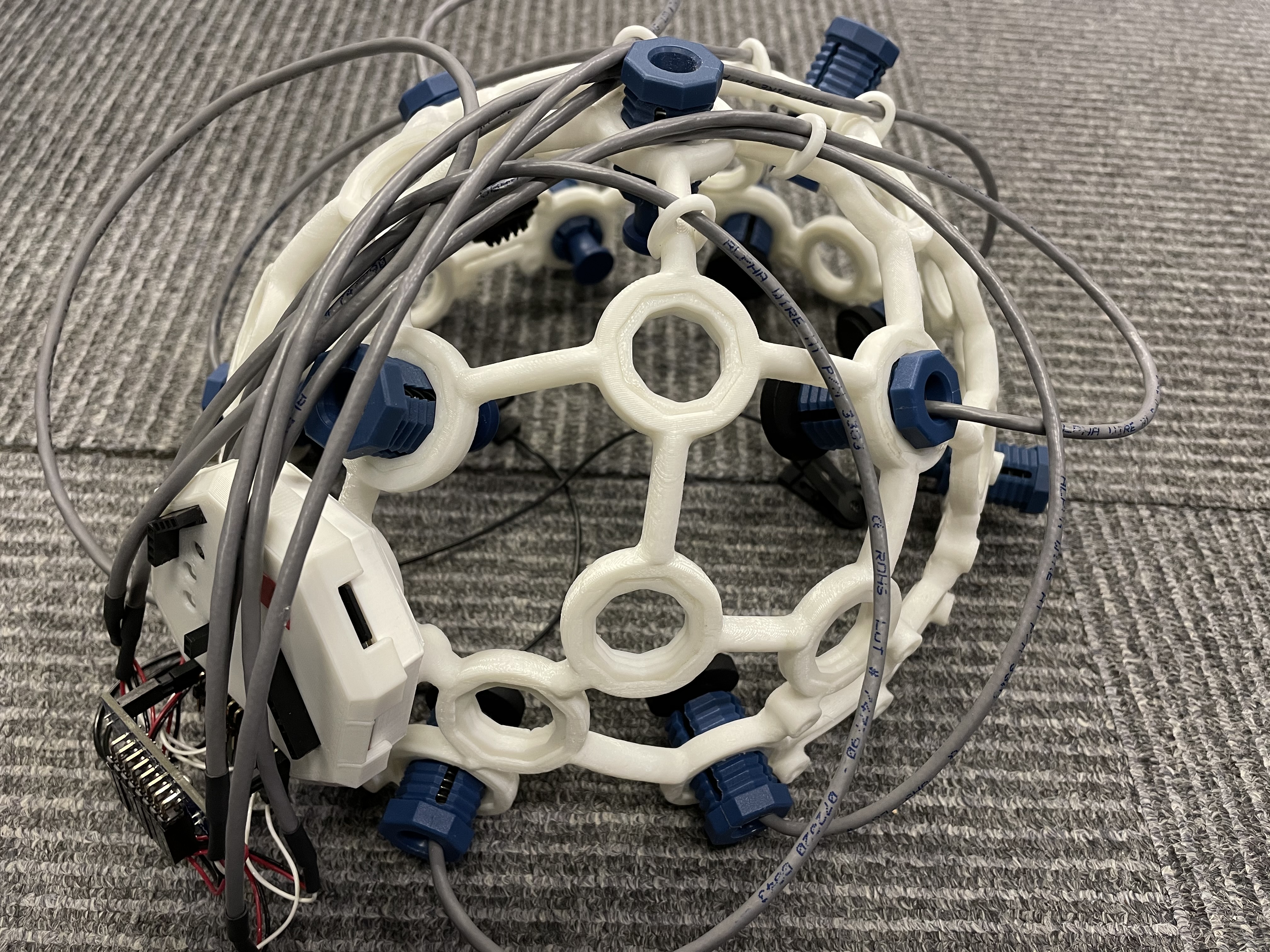
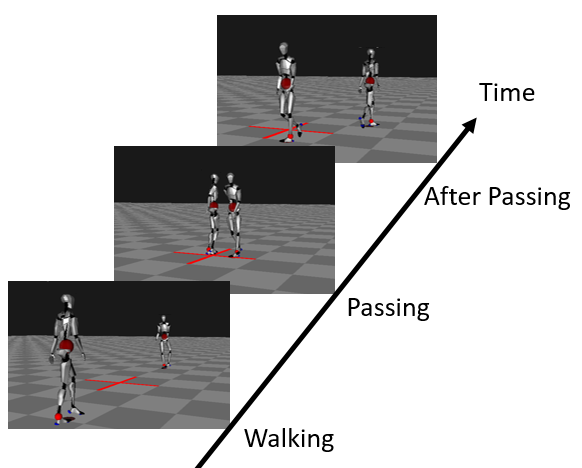
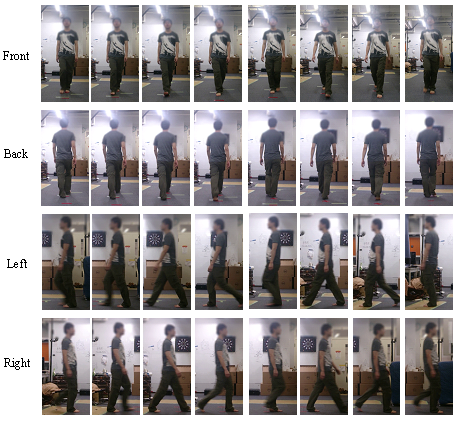
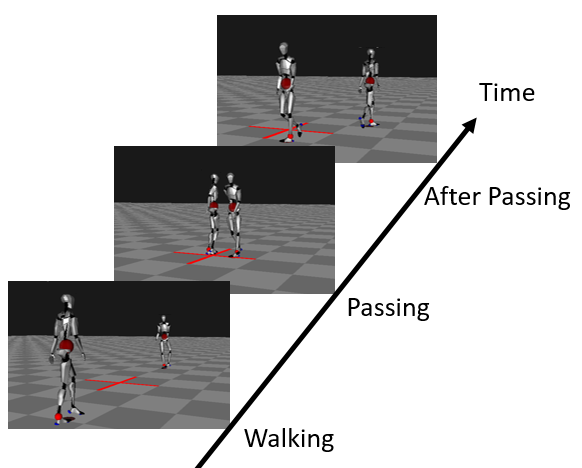
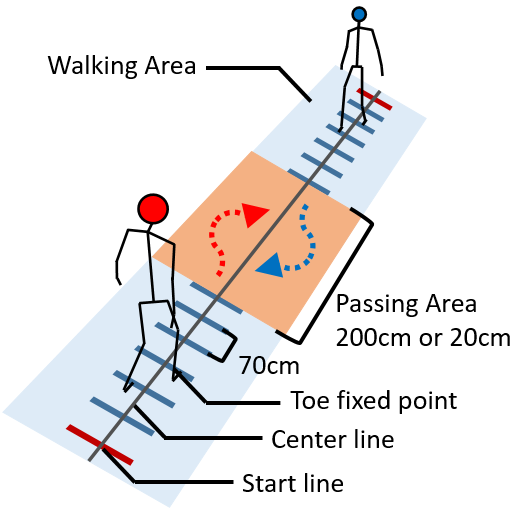
EEG study on autism spectrum traits during passing-by movements |
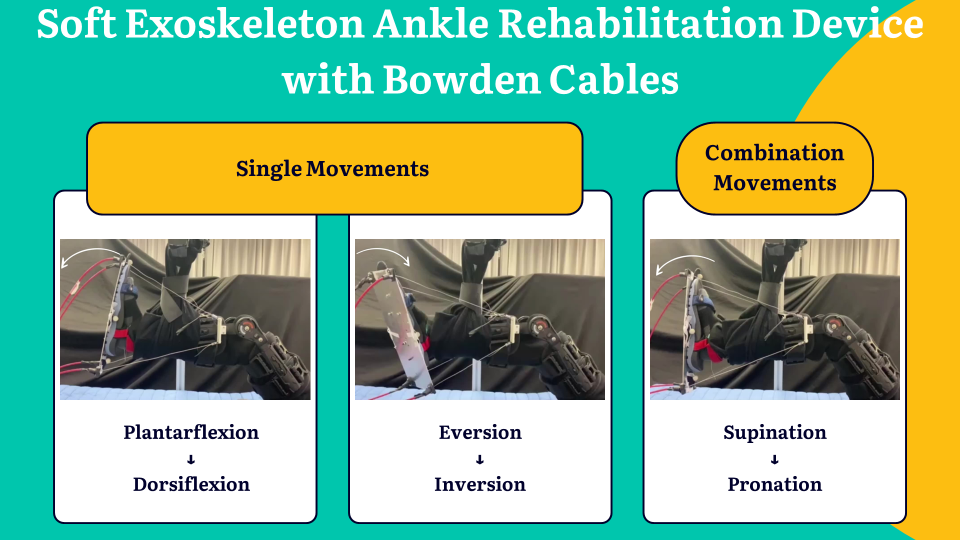
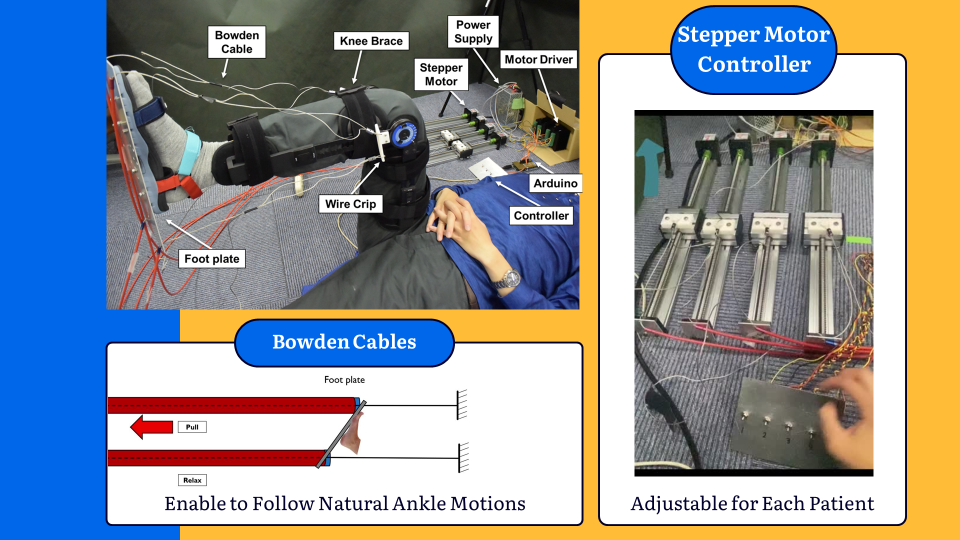
Soft Exoskeleton Ankle Rehabilitation Device with Bowden Cables |
 |
 |
|
|---|---|---|
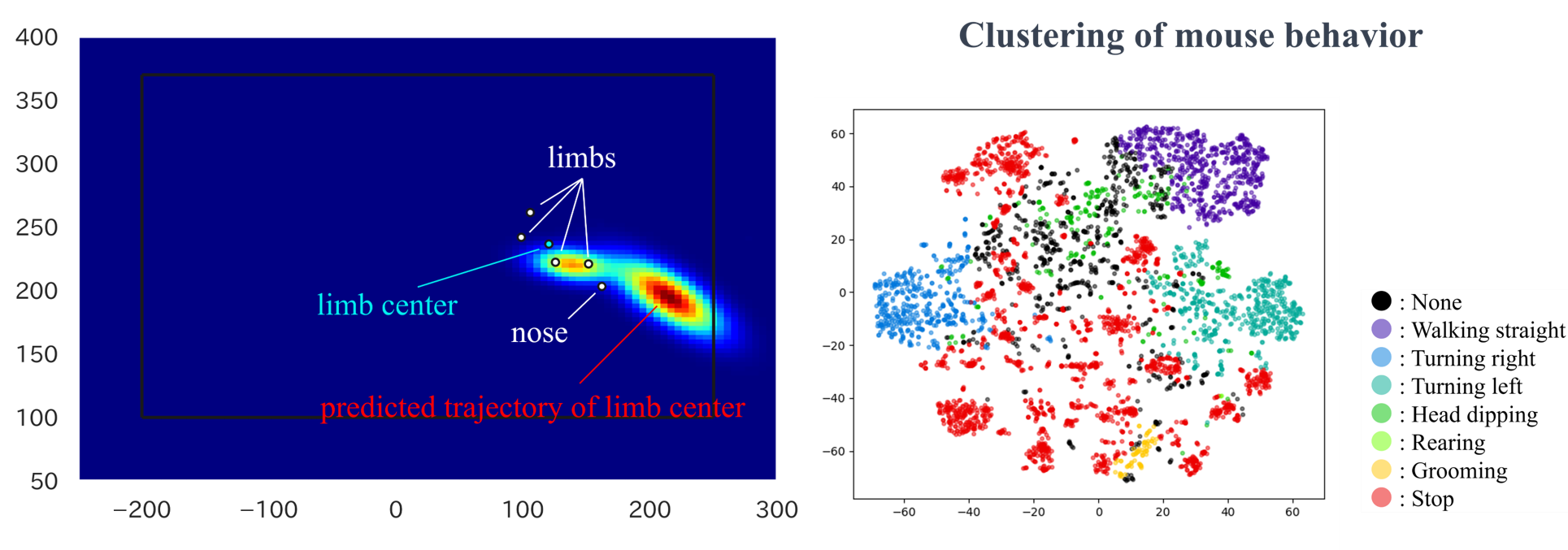
| Development of a mouse path prediction model using machine learning |
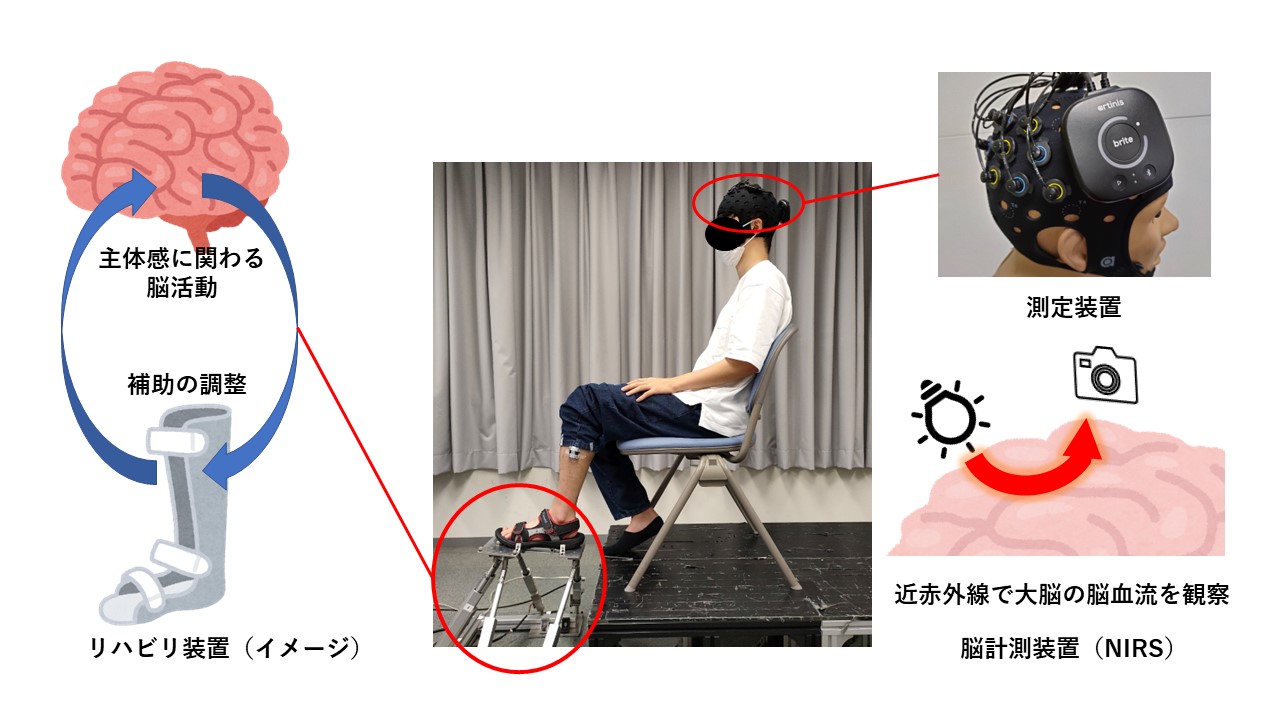
Research on more effective BMI rehabilitation for motor paralysis |
Cooperation project with external research institute
In our laboratory, we send out students to external institutions and cooperate with their own research.
Past Projects
This is a summary of the projects that have been worked on in our laboratory.
 |
 |
 |
|---|---|---|
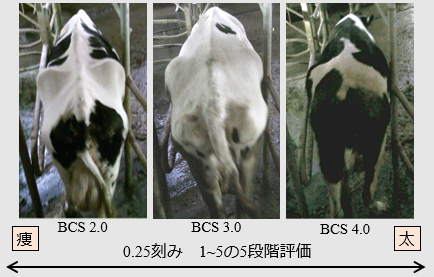
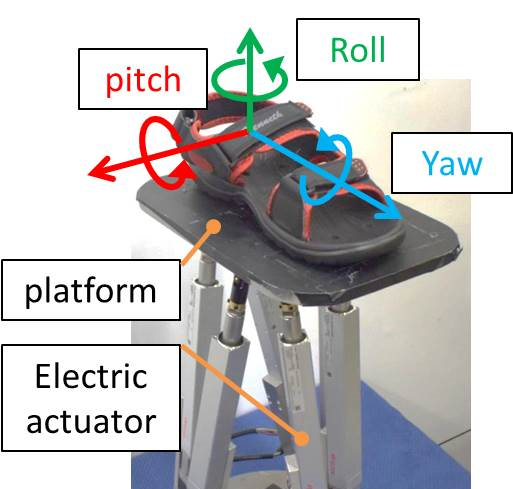
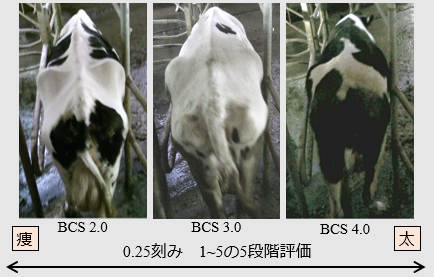
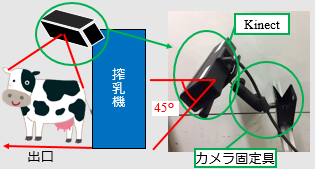
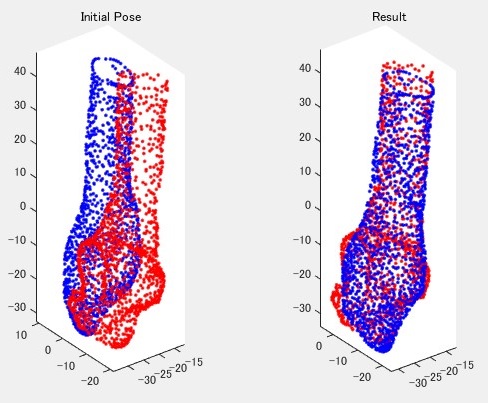
| Development of automatic measurement system of body condition score of cow using deep learning | Research of the rehabilitation device in consideration of the tarsal joint rotation axis |
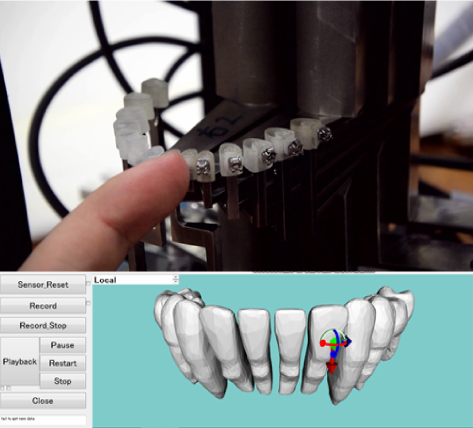
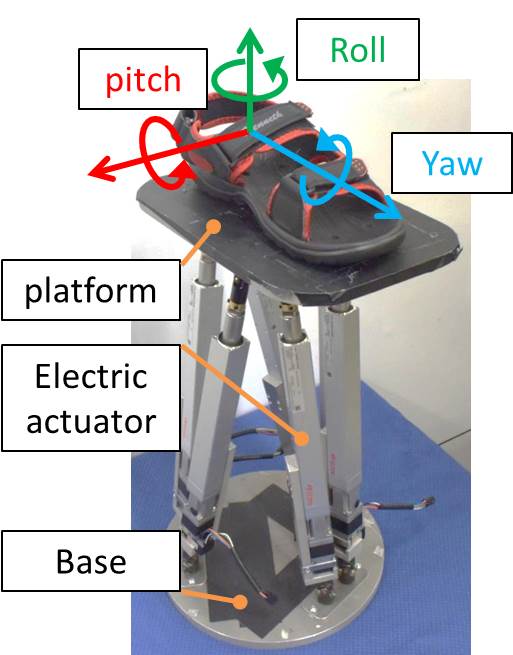
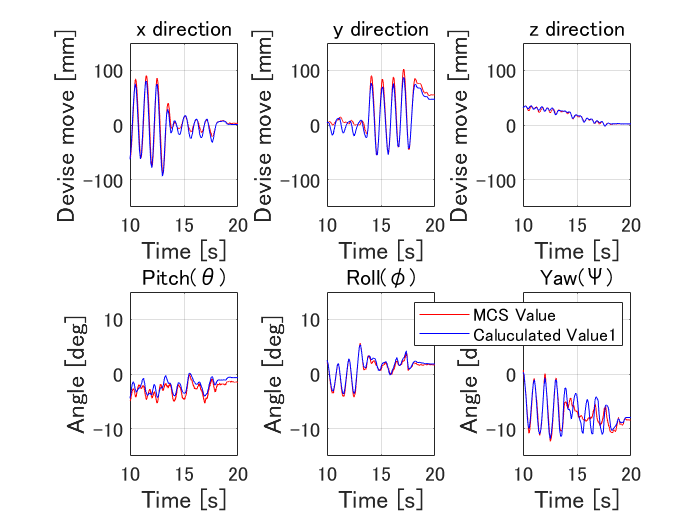
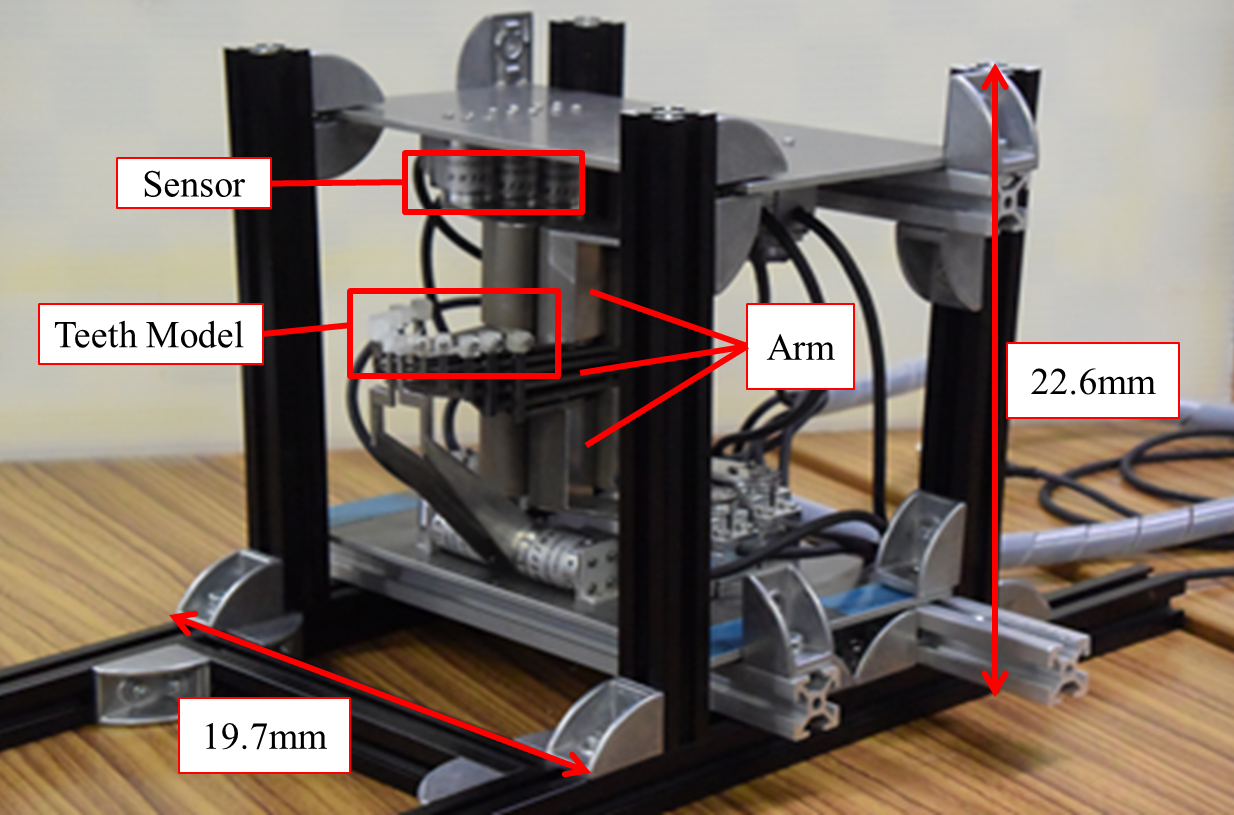
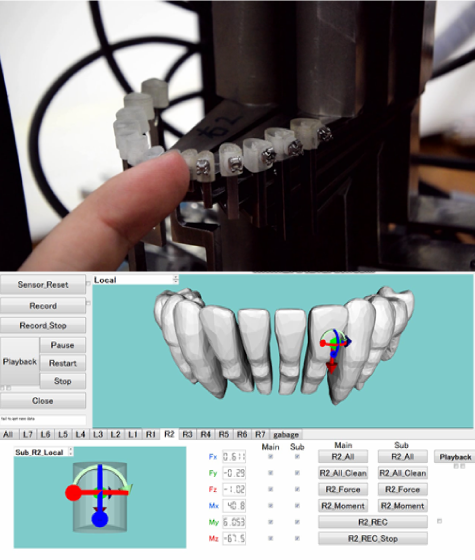
Development of simultaneous measurement device of 6-axis orthodontic force for quantitative evaluation of orthodontic treatment |
 |
 |
 |
|---|---|---|
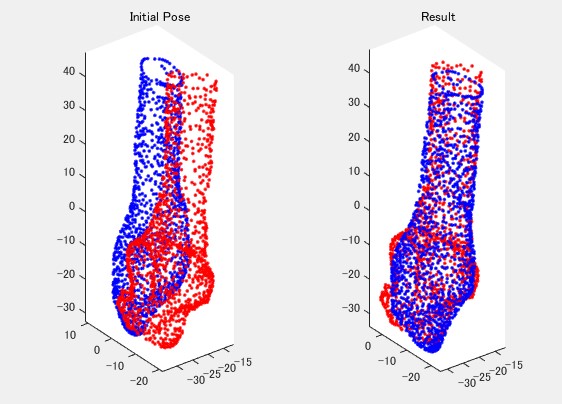
| A study on gait analysis by continuous animation reproduction of one gait cycle | A study on the correlation between ASD characteristics and gait characteristics at the time of passing two people | Evaluation method for tibial joint alignment in patients with osteoarthritis |

 |
 |
 |
|---|---|---|
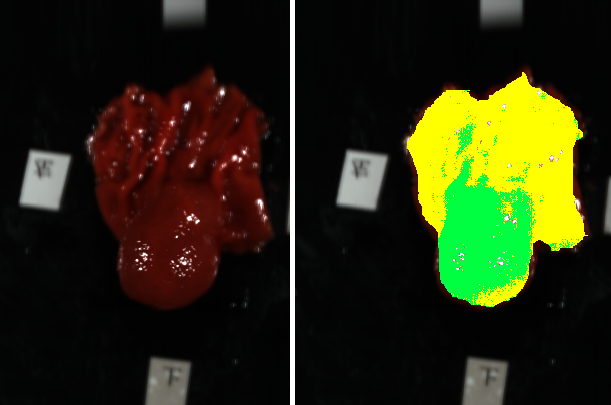
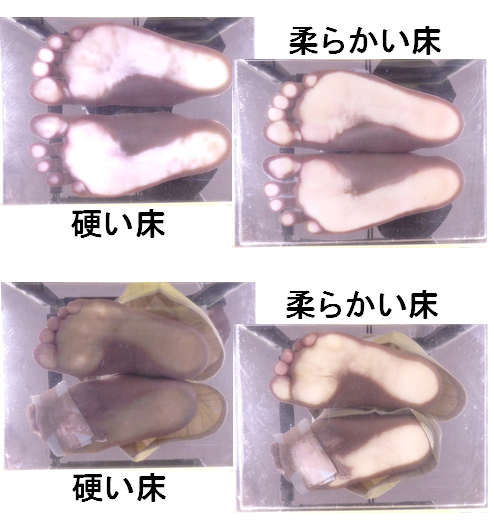
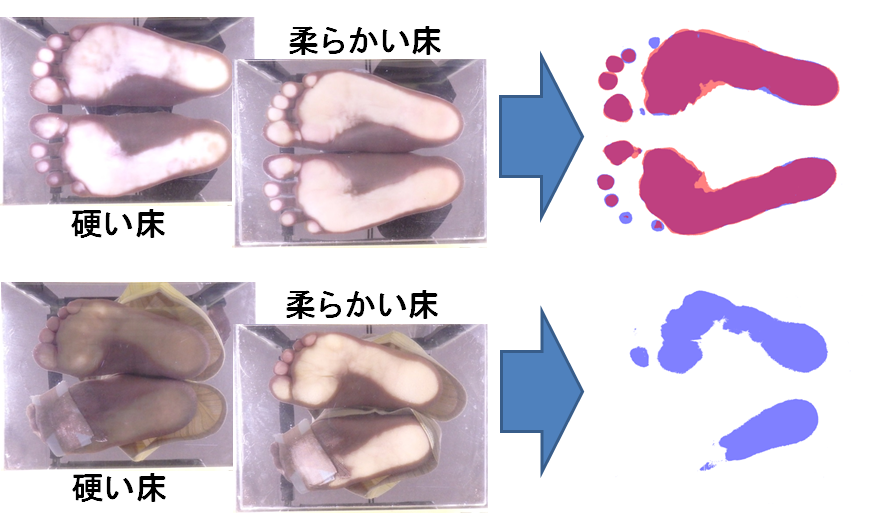
| Study on early screening of diabetic neuropathy focusing on foot sole images |
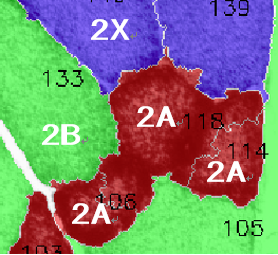
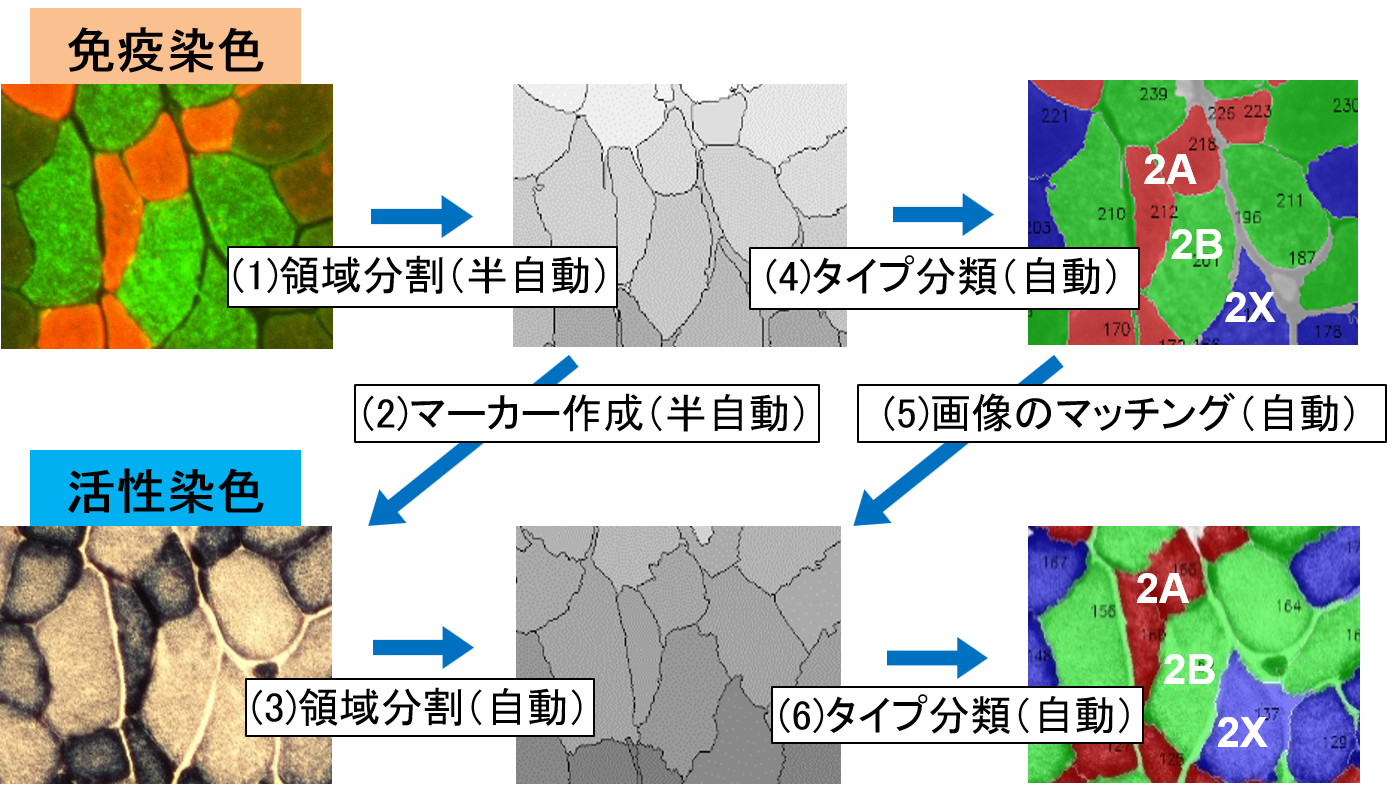
Development of image analysis support software for skeletal muscle stained images |
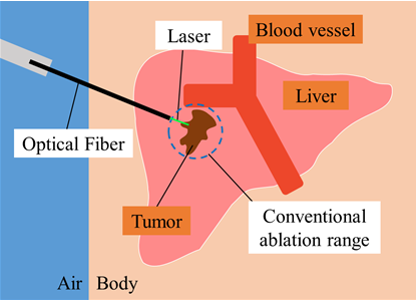
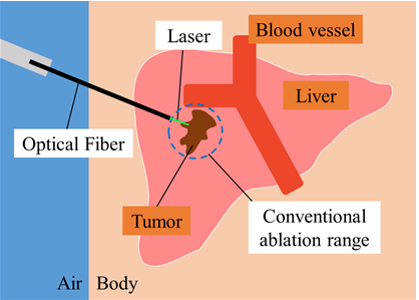
Device development for realization of puncture light ablation of intratumoral tumor |

 |
 |
|
|---|---|---|
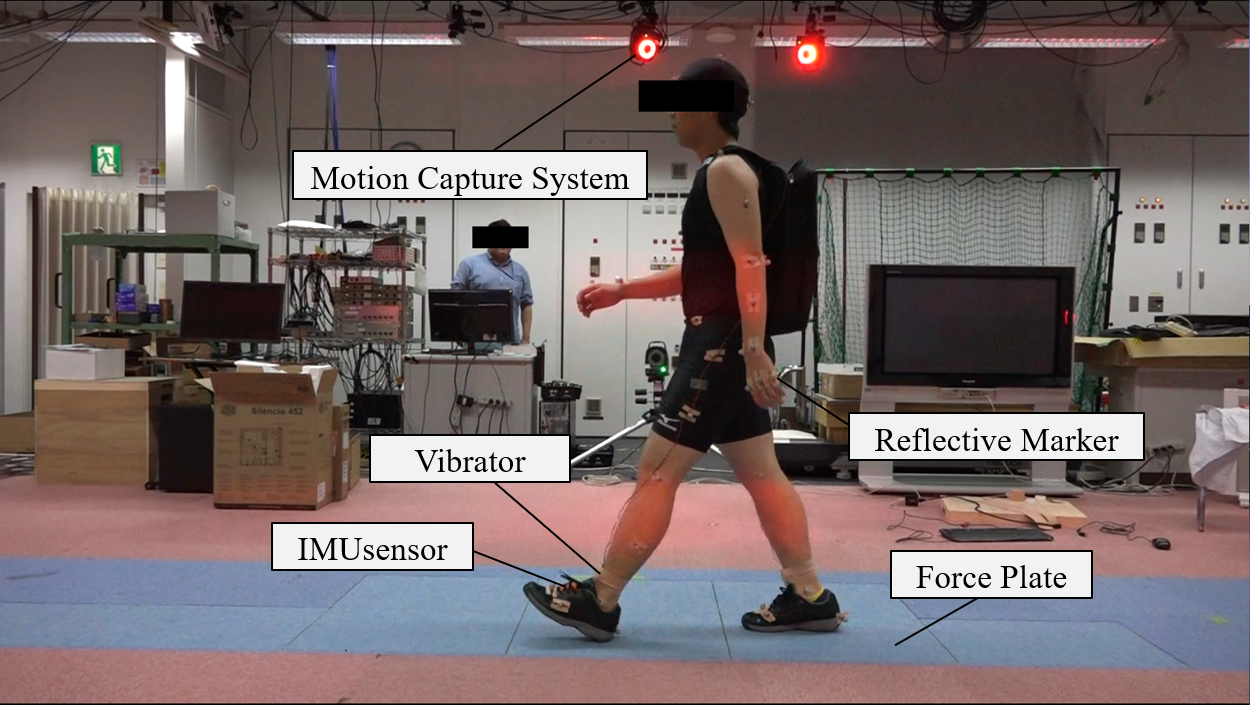
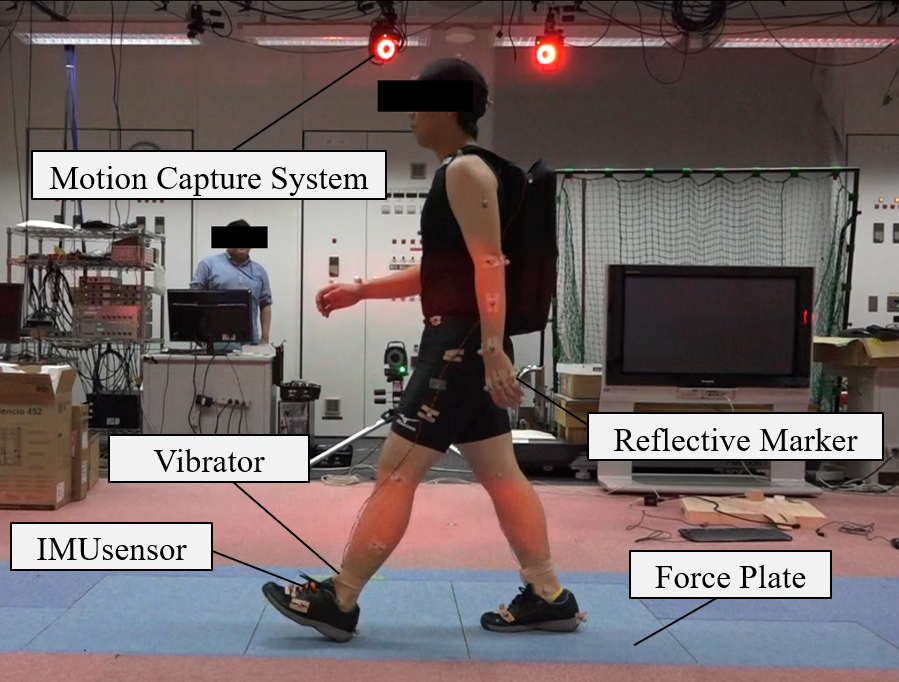
| Evaluation of movement change associated with vibration intervention to free legs |
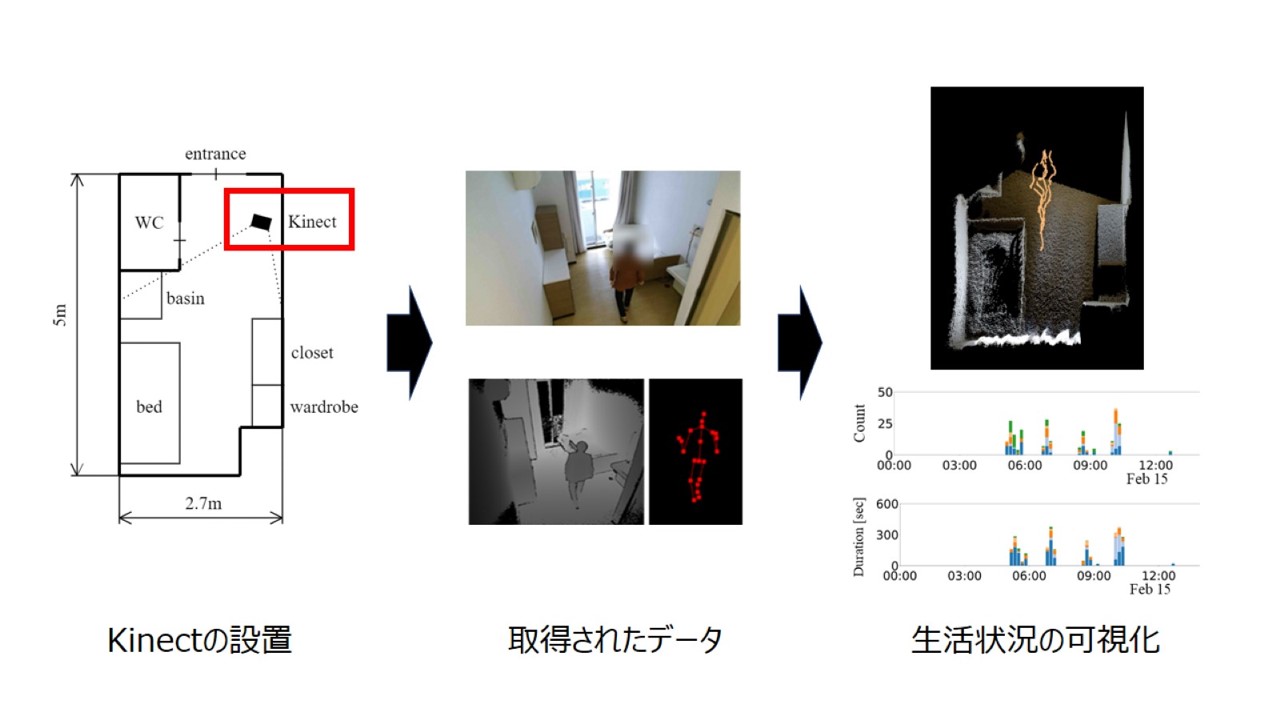
Development of a system for grasping the living conditions of the elderly using RGBD cameras and visual sensors |