研究内容
研究室内部のプロジェクト
幣研究室で現在取り組んでいるプロジェクトをまとめています。
画像をクリックすることで、より詳しい説明を御覧いただけます。
 |
 |
 |
|---|---|---|
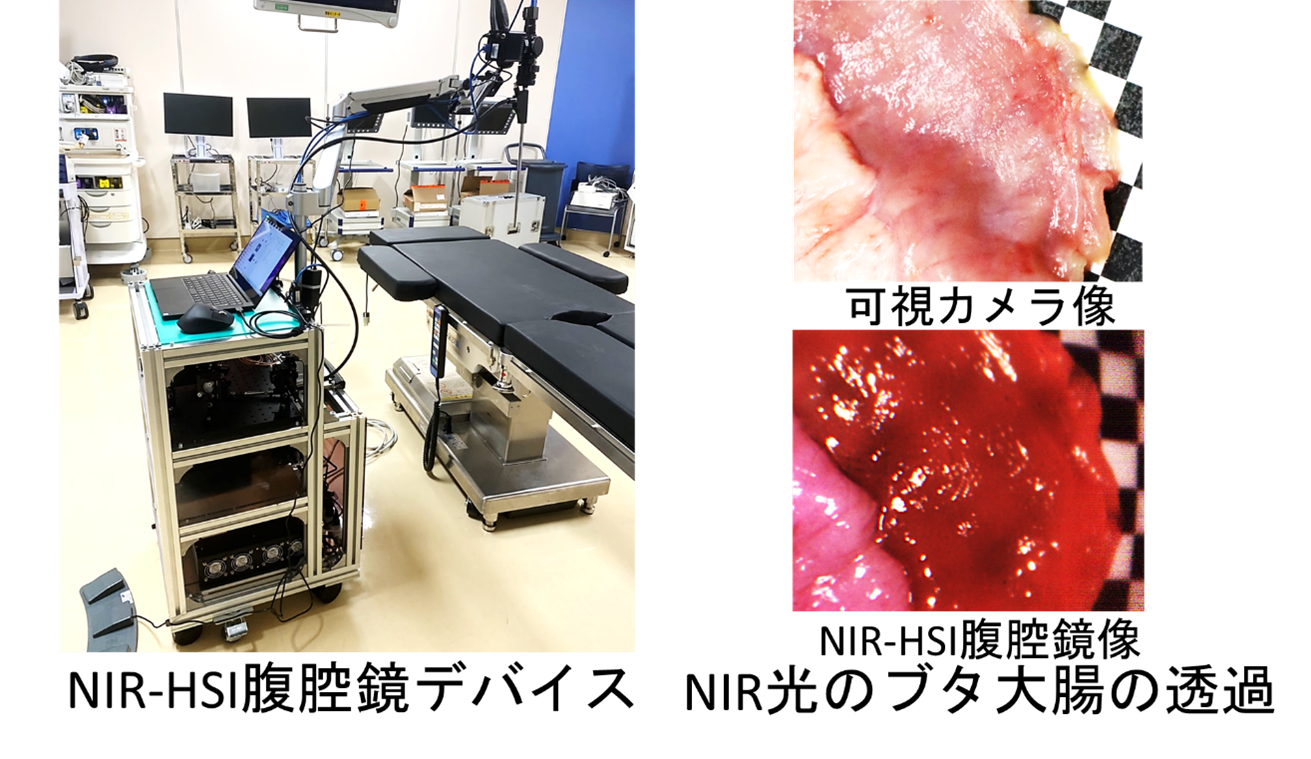
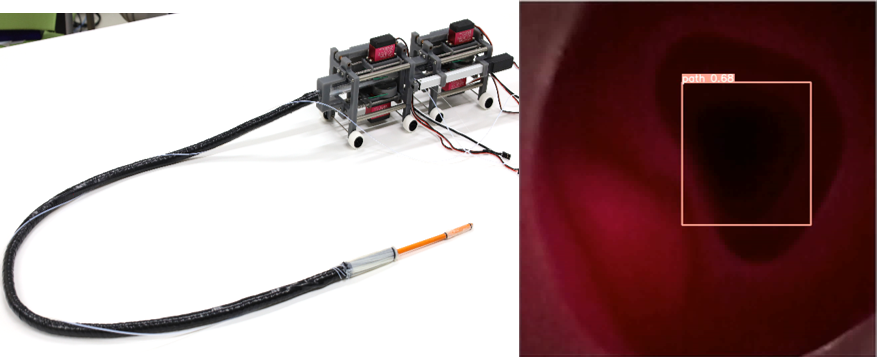
| 近赤外光を利用した 硬性内視鏡デバイスの開発と 生体深部組織の識別 |
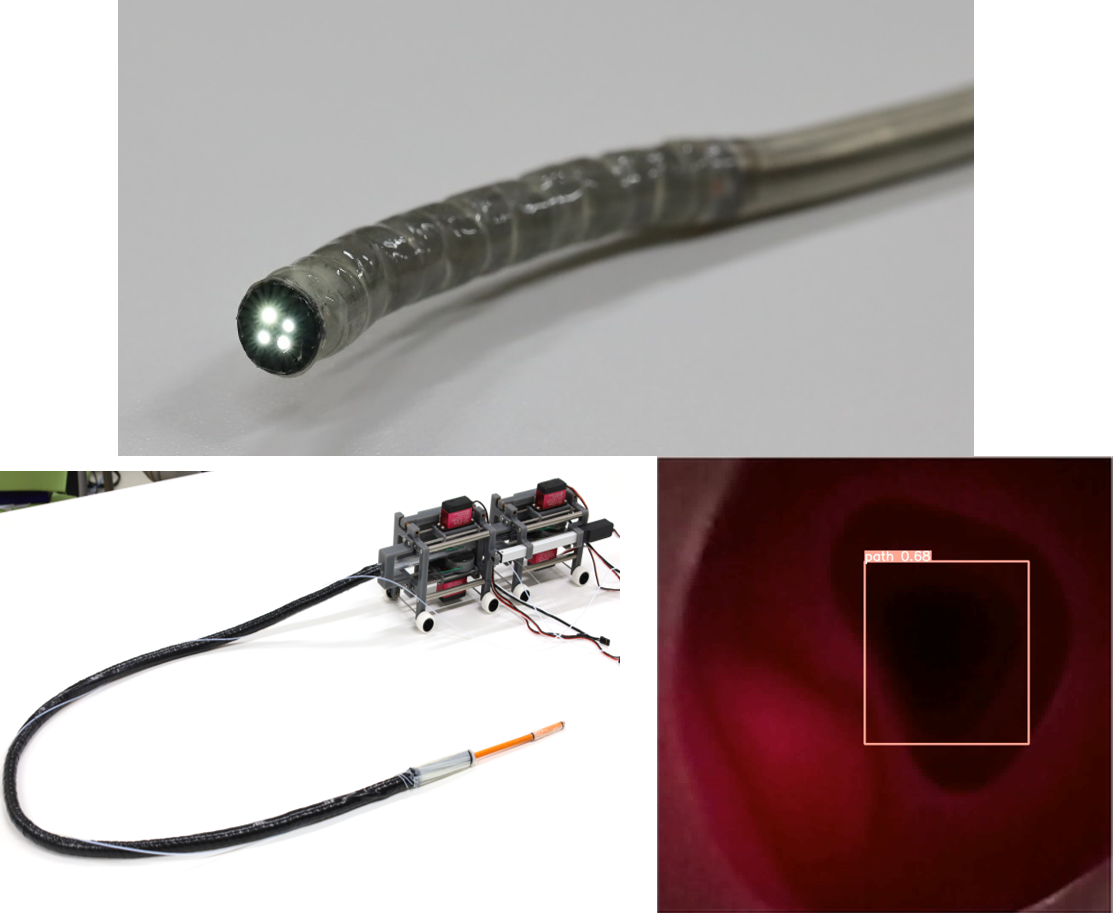
大腸内視鏡 自動挿入デバイスの開発 |
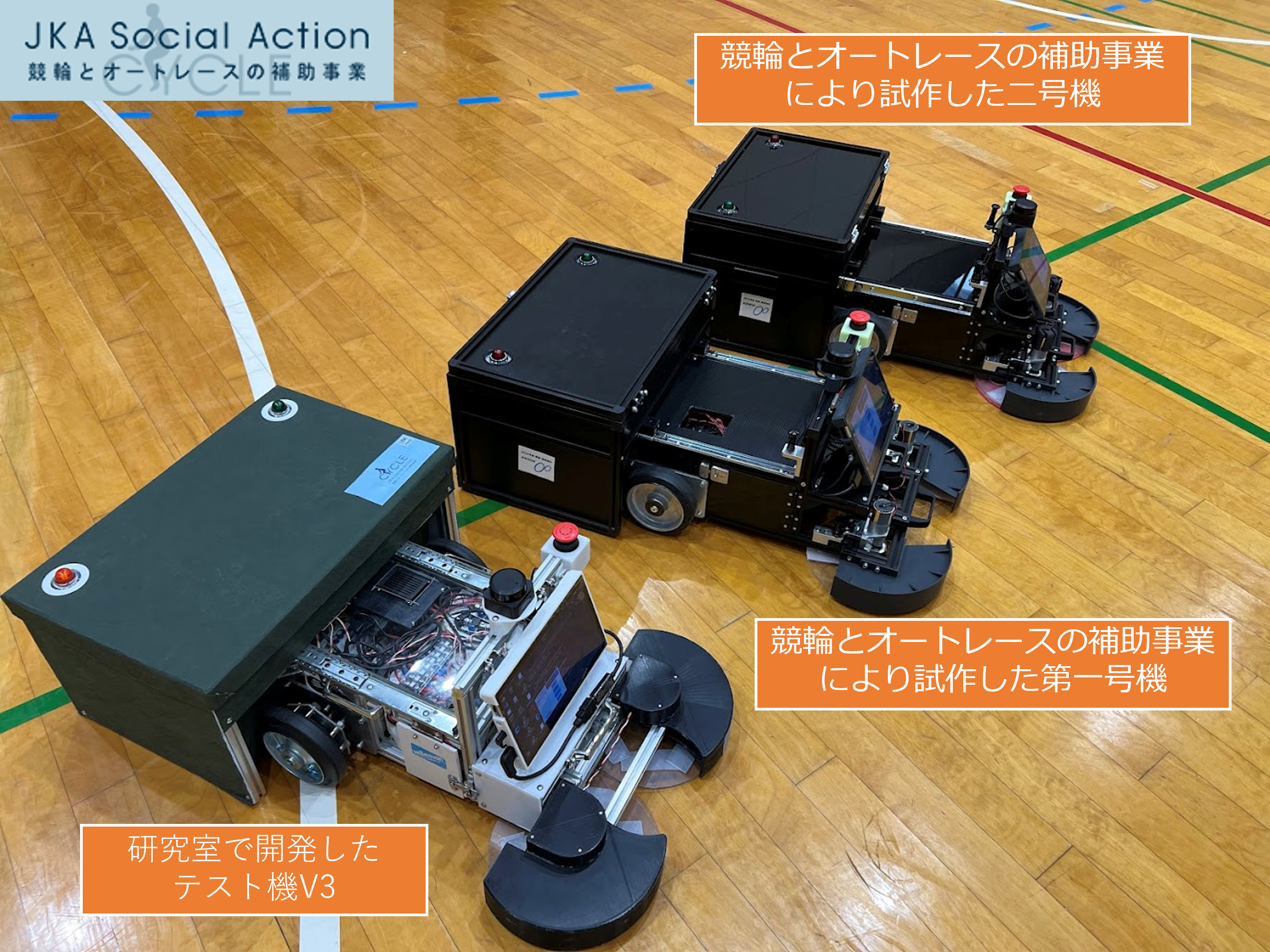
体育館メンテナンスに関する研究 |

 |
 |
 |
|---|---|---|
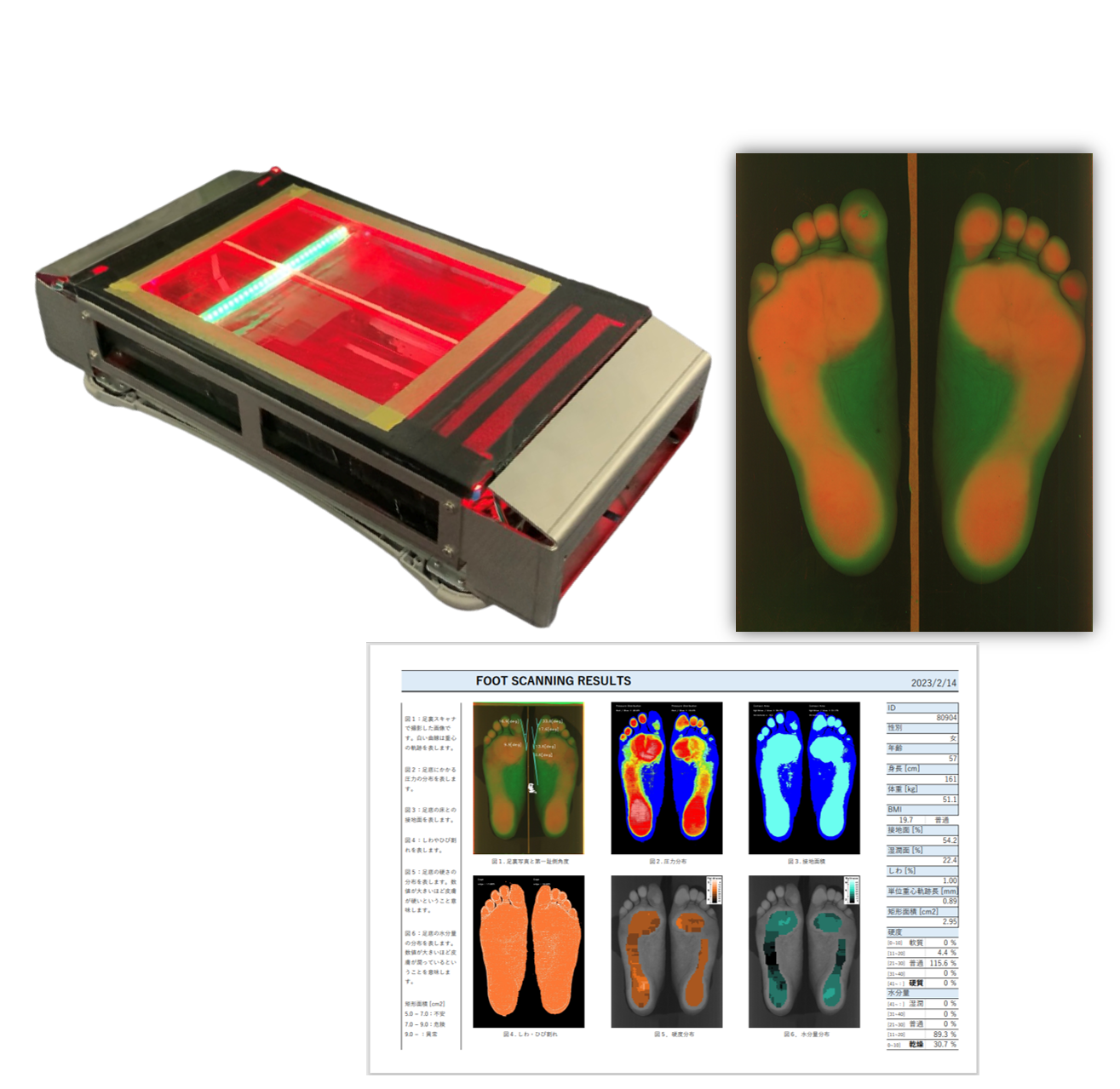
| 糖尿病神経障害の 早期スクリーニングに向けた 足裏スキャナの開発 |
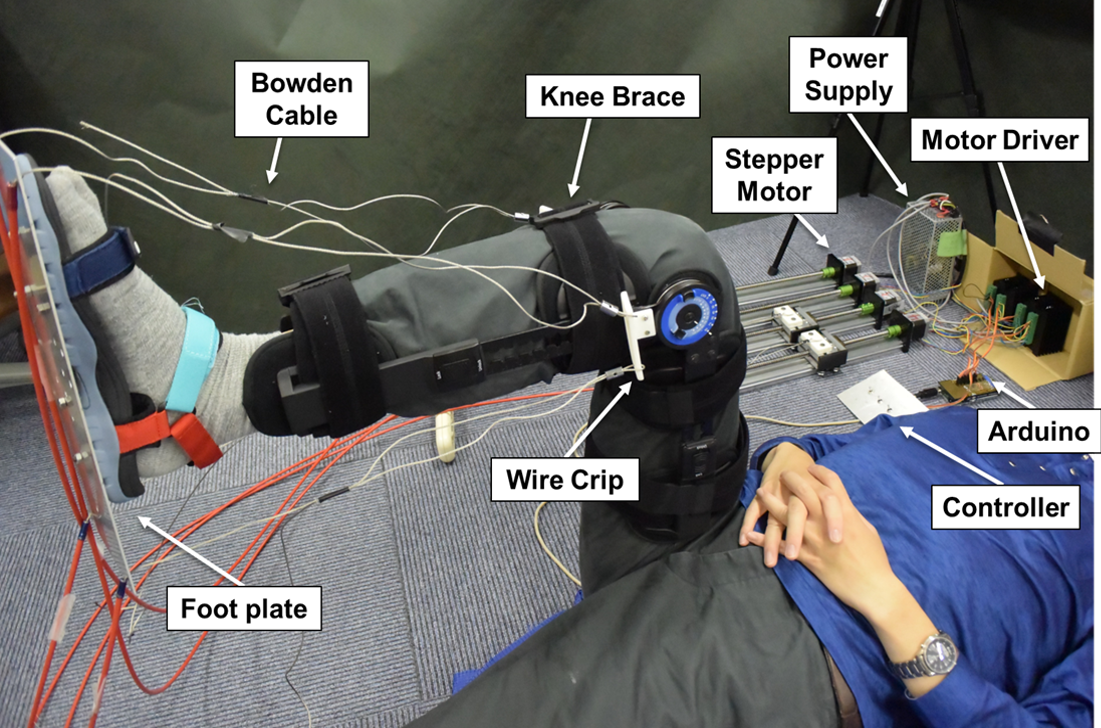
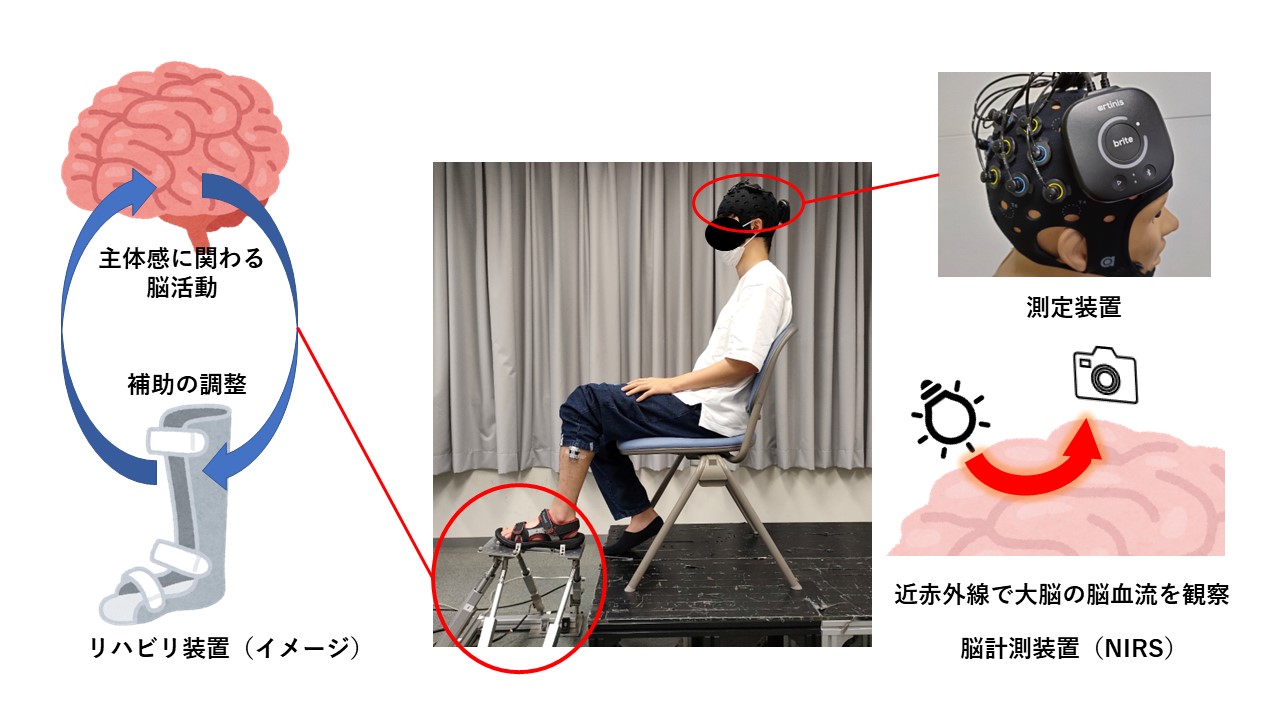
ボーデンケーブル付き ソフト外骨格 足首リハビリテーション装置 |
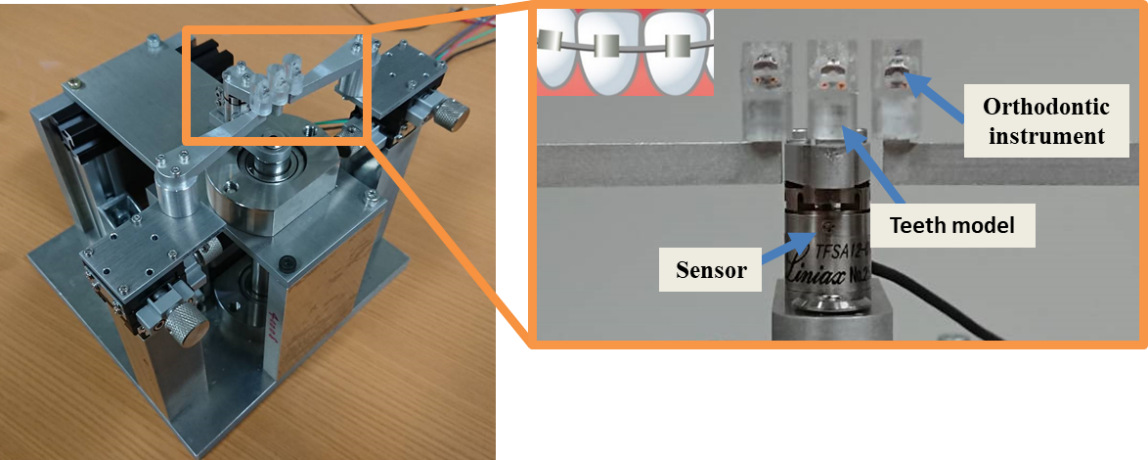
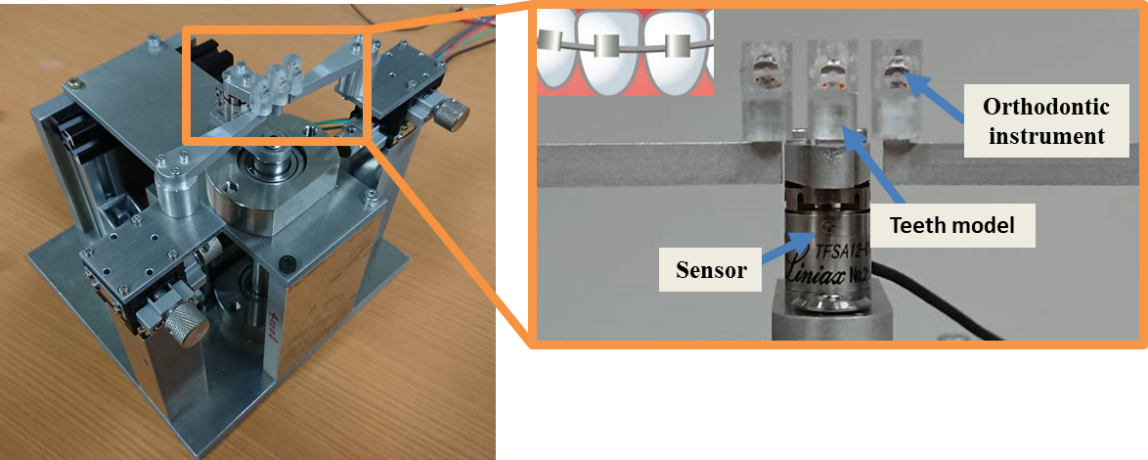
歯列矯正治療の定量的評価を目的とした6軸歯列矯正力測定装置の 開発 |
 |
 |
 |
|---|---|---|
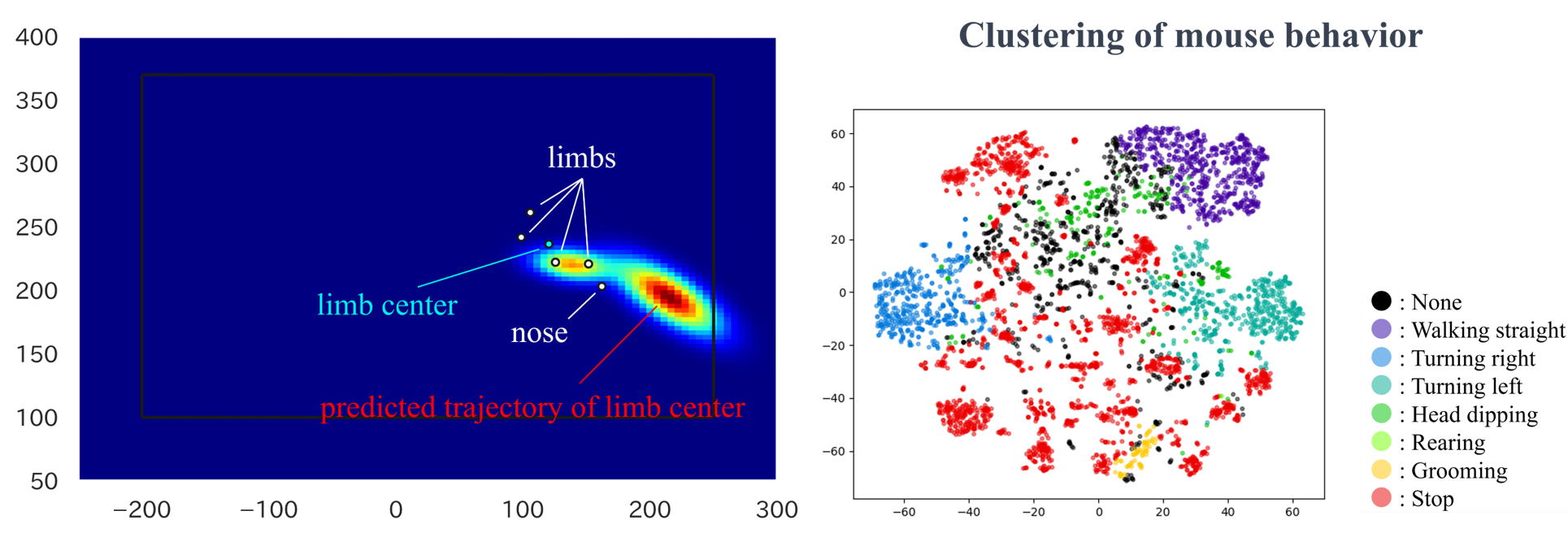
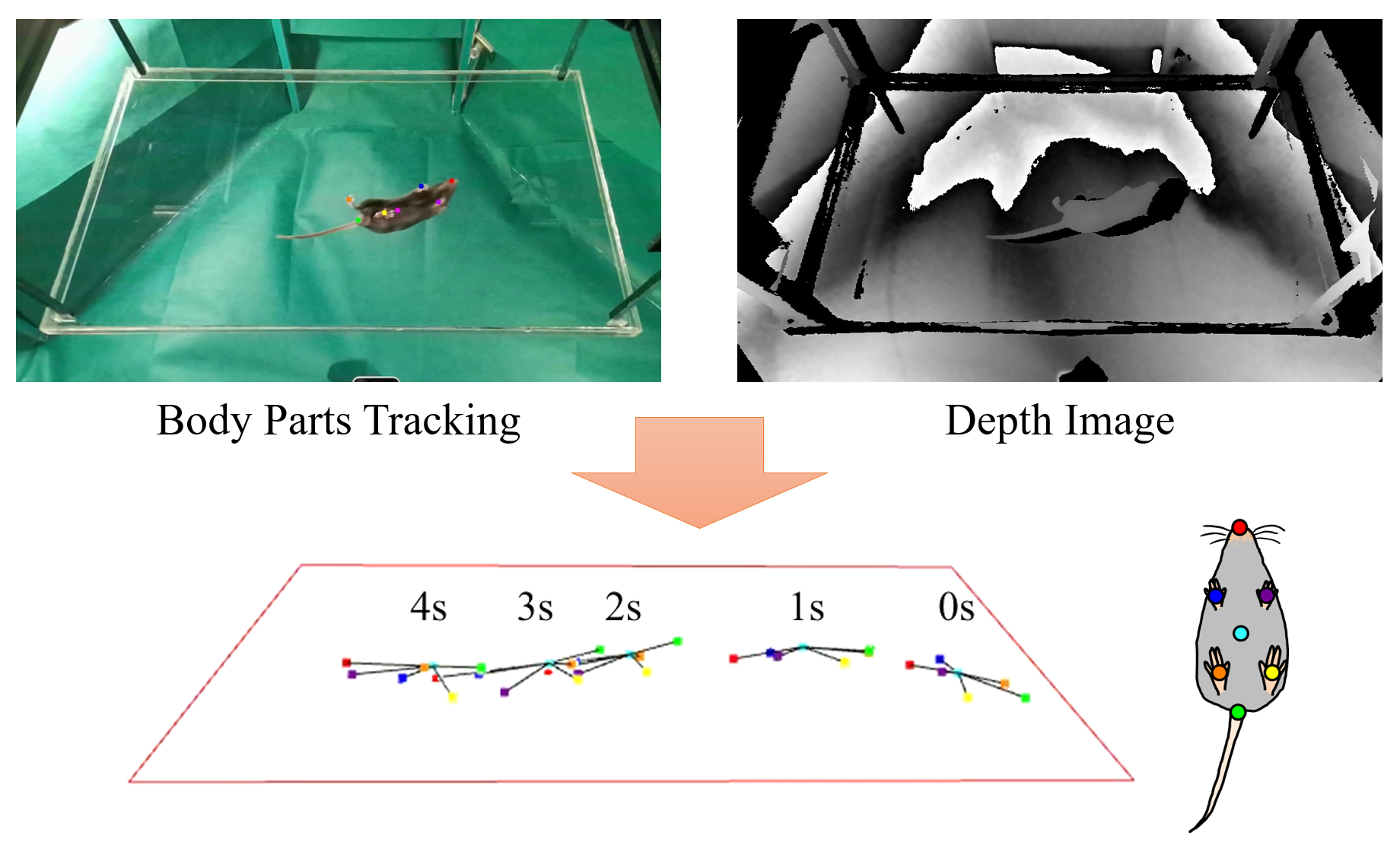
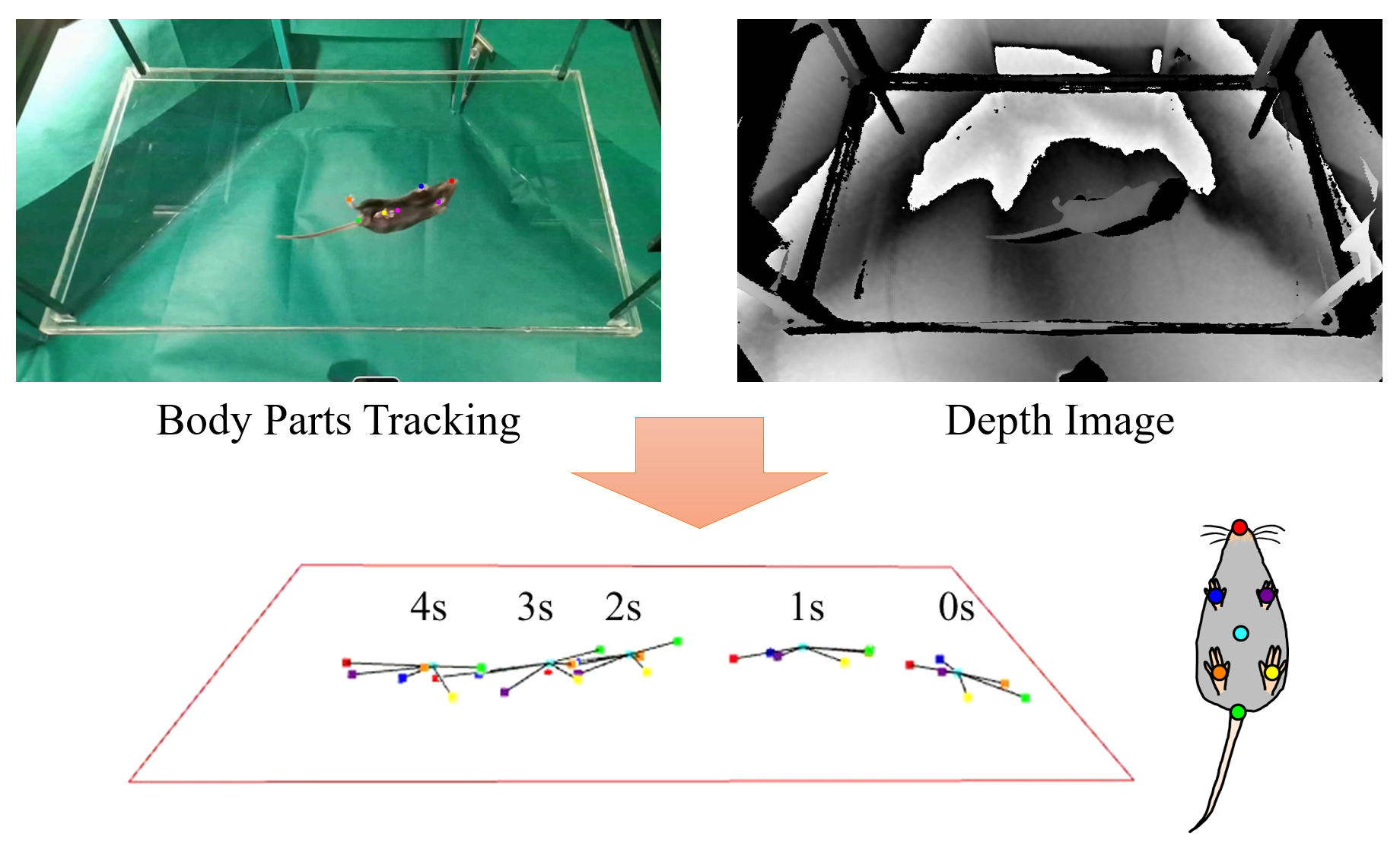
| RGB-Dカメラを用いたマウスの 3次元姿勢推定に関する研究 |
RGB-Dカメラを用いたマウスの 3次元姿勢推定に関する研究 |
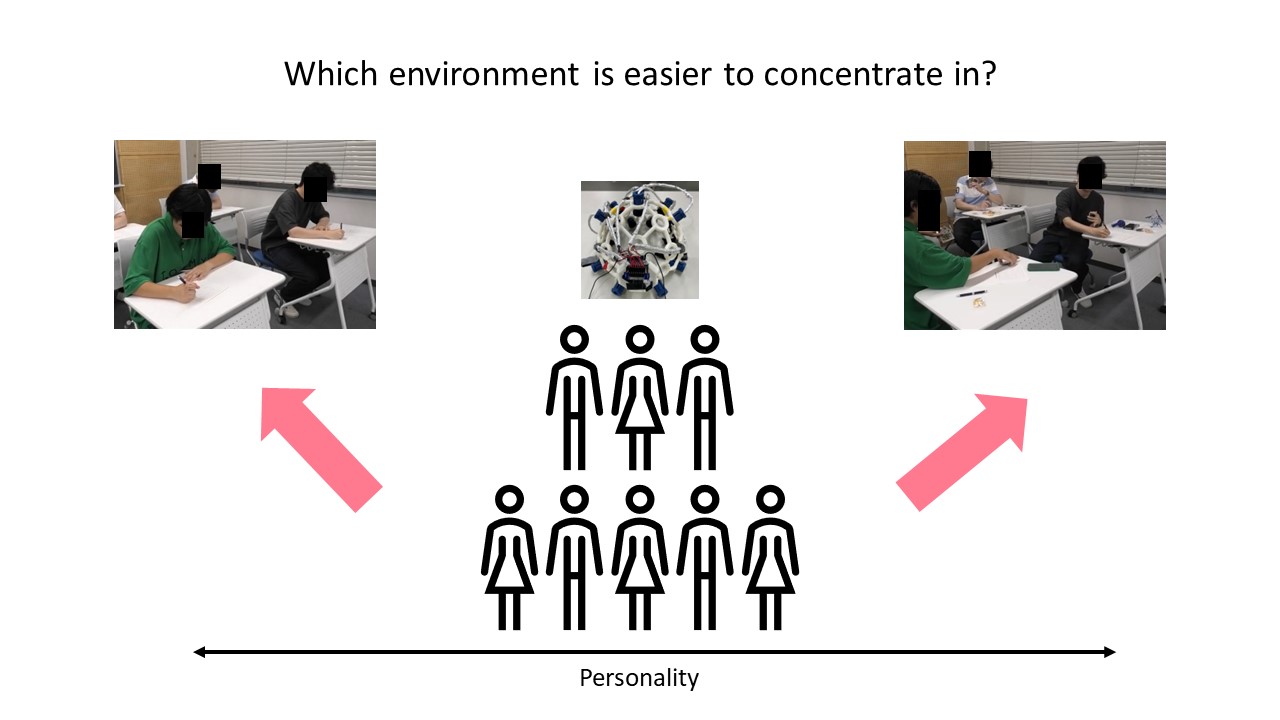
聴性定常反応を用いた個々人の性格に基づく集中しやすい環境の検証 |
 |
||
|---|---|---|
| 運動麻痺に対するより効果的なBMIリハビリテーションに関する研究 | 形状の異なる人工足関節に関する研究 |
外部研究機関との協力プロジェクト
幣研究室では外部機関へ所属学生を送り出し、そこで行われる独自的な研究に協力しています。
過去のプロジェクト
過去に研究室内部で、または外部研究機関と協力して取り組んでいたプロジェクトをまとめています。
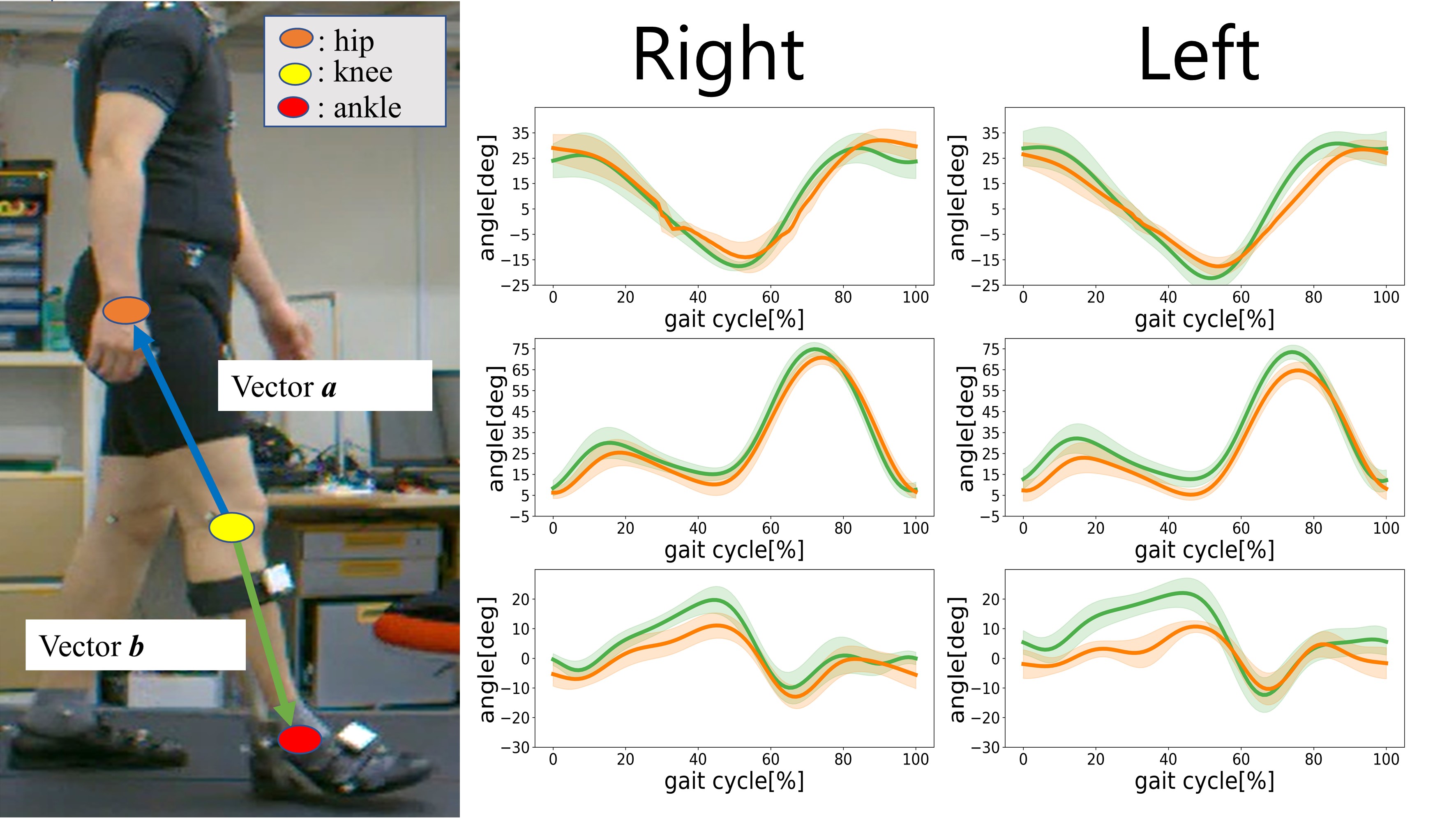
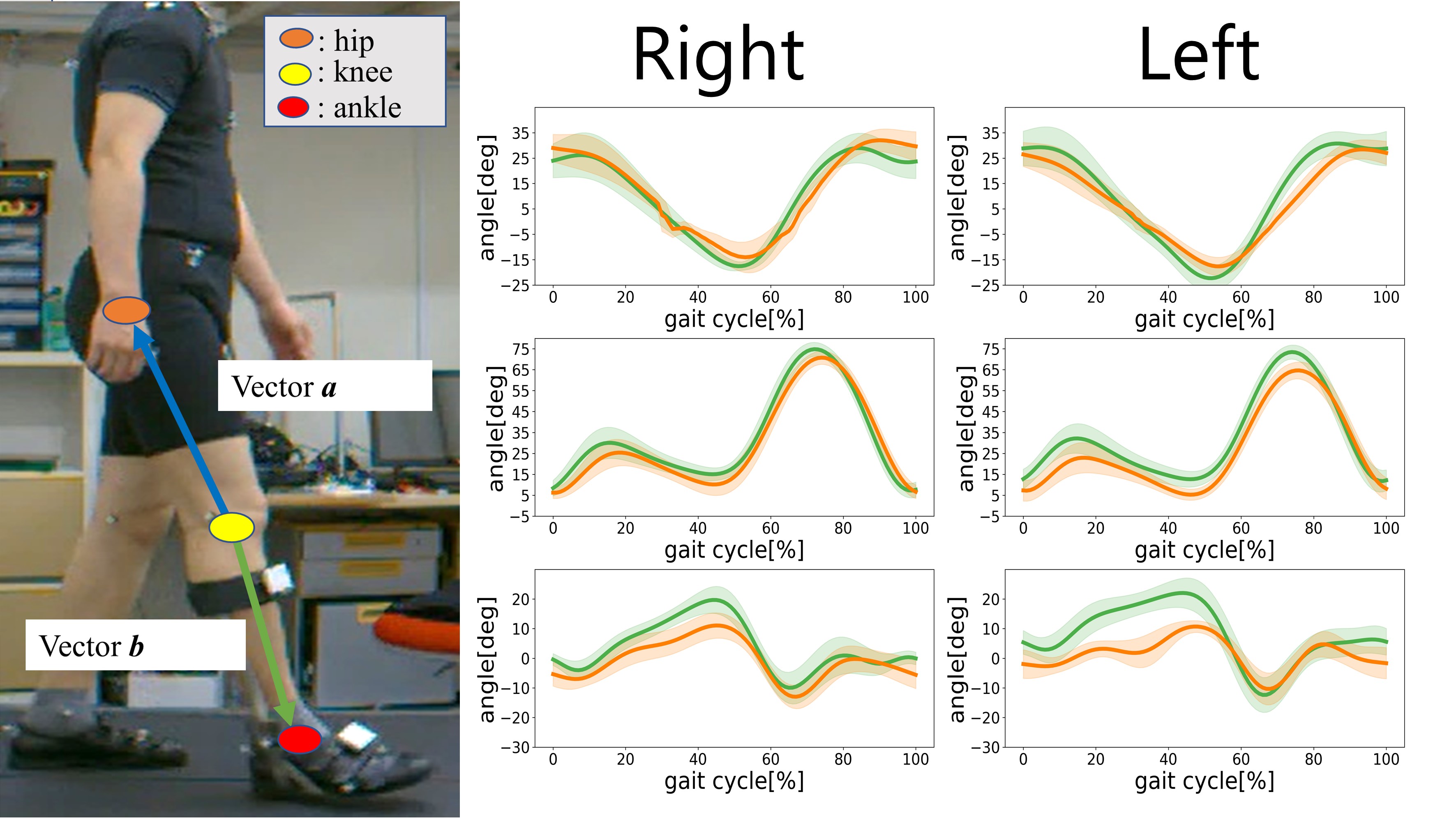
歩行解析は医療分野で重要視されており,高精度での計測が必要な臨床現場では三次元動作解析装置(Three Dimensional Motion capture system: 3DMC)が使用されている.しかし3DMCを用いるためには広い空間が必要であることや反射マーカーの貼り付け時などに専門知識が必要となるため,簡便とはいえない.また,3DMCの代替手法として,簡易さを重視した解析を試みた先行研究は散見されるが,光の変化の影響を受けやすいこと,関節角度の推定誤差が非常に大きいこと,などの欠点がある.
そこで本研究では単一のRGBカメラを利用して,一定の精度を持ちながらも簡易な歩行解析をすることを目的としている.
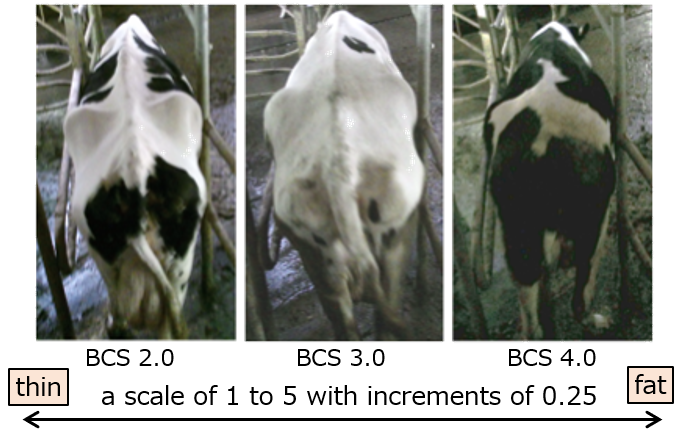
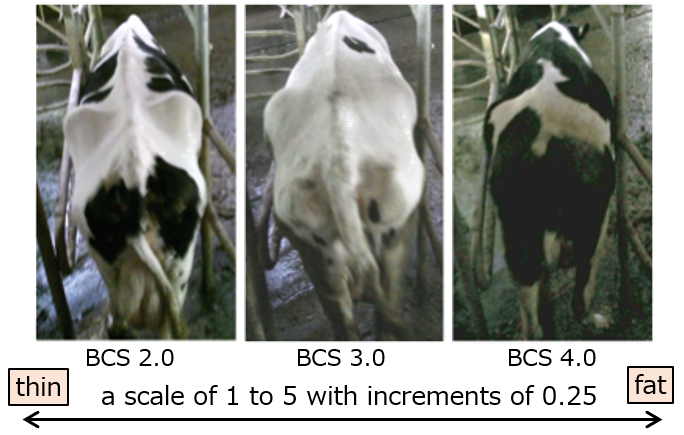
現在,乳牛一頭当たりの乳量も伸び悩んでおり,今後も全体の生産量は減少していくことが懸念されている.乳牛の栄養状態は乳量に多大な影響があると考えられており,適切な栄養状態の管理をするためのシステムの開発を早急に行う必要がある.
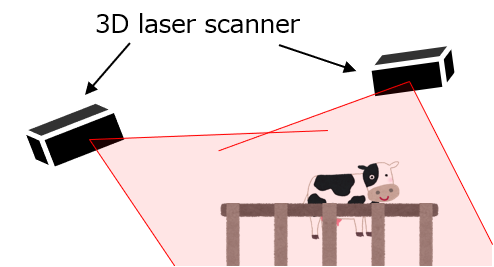
ボディコンディションスコア(BCS)は,体表面の形状により1~5の0.25刻みで評価される家畜の体脂肪蓄積状態を表す.特に乳牛においては,単なる肥満度の測定ではなく,泌乳の各段階に応じた適切な摂食管理のための重要な指標となる.しかし,BCSは熟練者が1つずつ手動で決定しており,牧場内全ての牛を測定するには多くの時間と労力がかかってしまう.そこで,3次元レーザースキャナを用いてBCSを自動で計測できる高精度なシステムを開発することを本研究の目的としている.
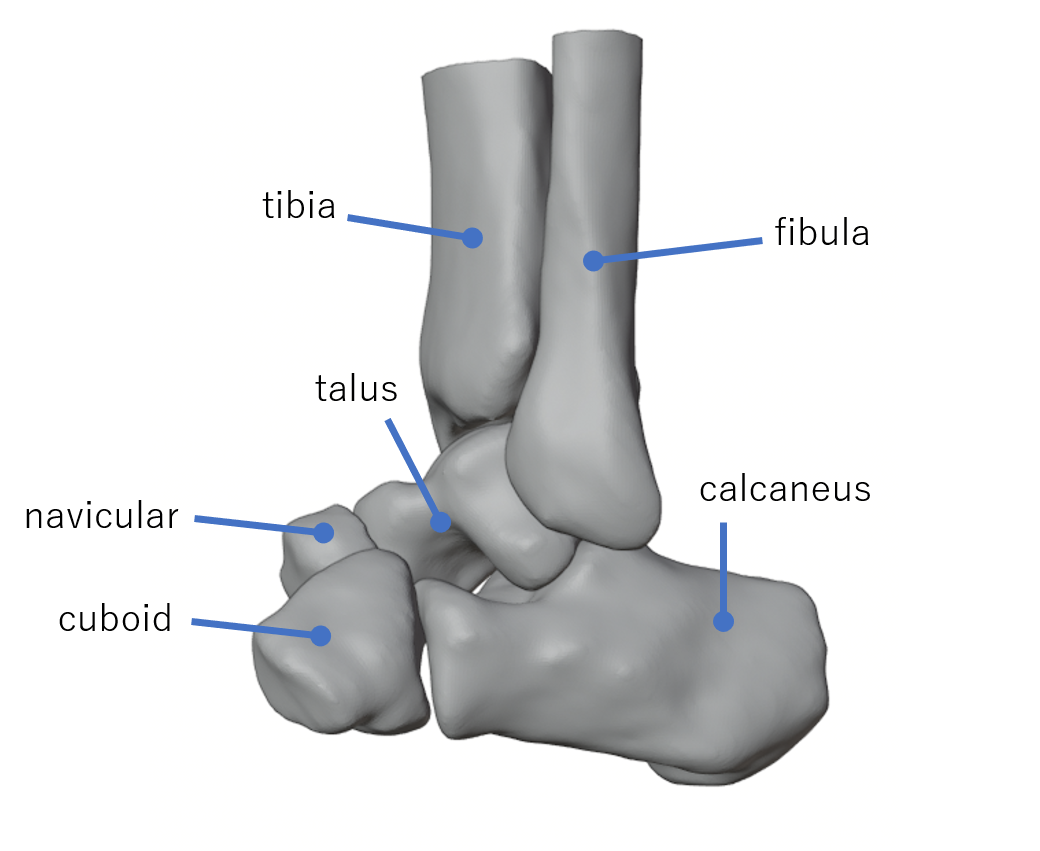
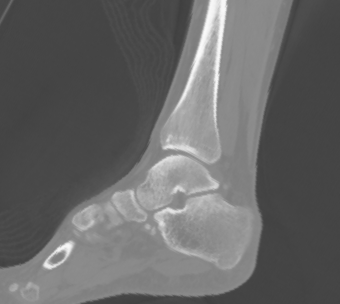
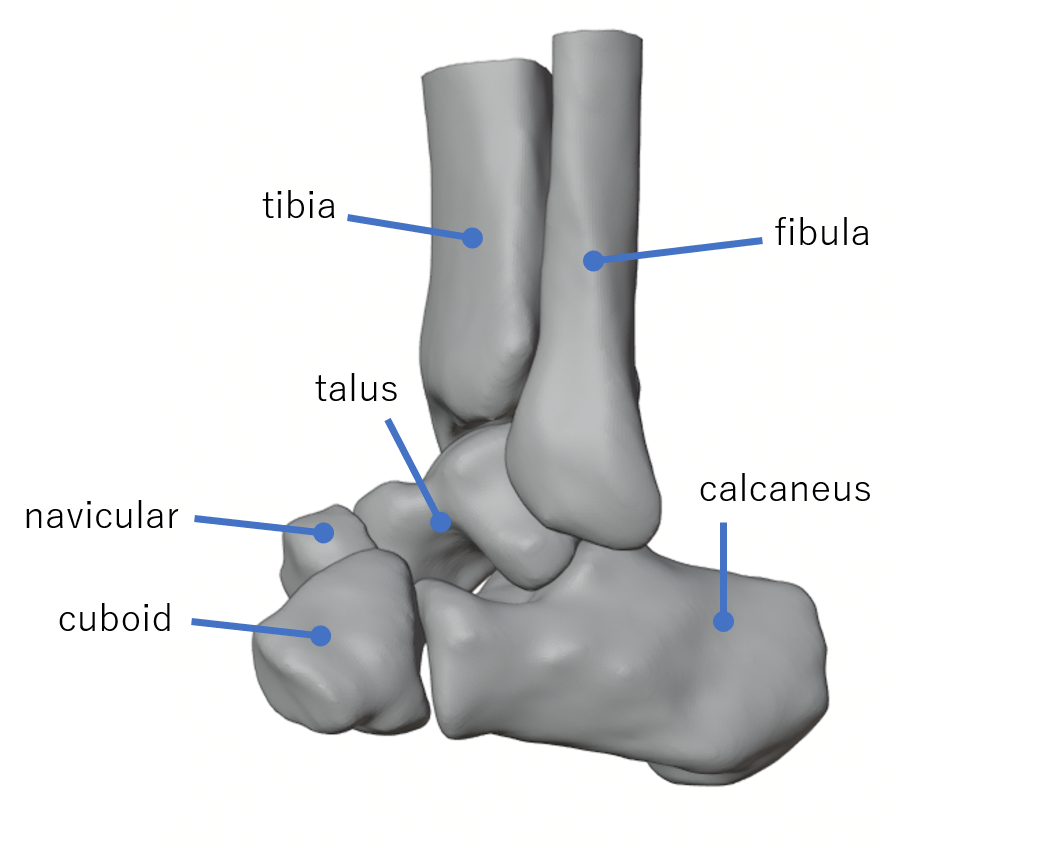
変形性足関節症は,日常生活に支障が出るほどの痛みを伴う足首の関節症である.変形性足関節症の病態の解明のためには,足の2本の骨(脛骨と腓骨)の相対的位置関係を分析しなければならない.
近年,変形性足関節症患者のこれらの骨の関係を調べる研究が報告されている.それらの研究ではCTやX線などの医用画像を使用して骨の関係を分析している.しかし,これらの医用画像は2次元画像であり画像正面方向の変位量を算出することができない.3次元的に解析すれば正面方向の変位量が算出可能である.
以上を踏まえ,本研究では骨を3次元モデル化することで、変位量を測定する研究を進めている.また,この技術を活かし外反母趾の研究も行っている.
 |
 |
 |
|---|---|---|
| RGBカメラを使った 簡易な歩行計測 |
乳牛のボディコンディション スコアの自動計測システムの開発 |
変形性足関節症患者の アライメント(相対位置)変化に関する研究 |
 |
 |
 |
|---|---|---|
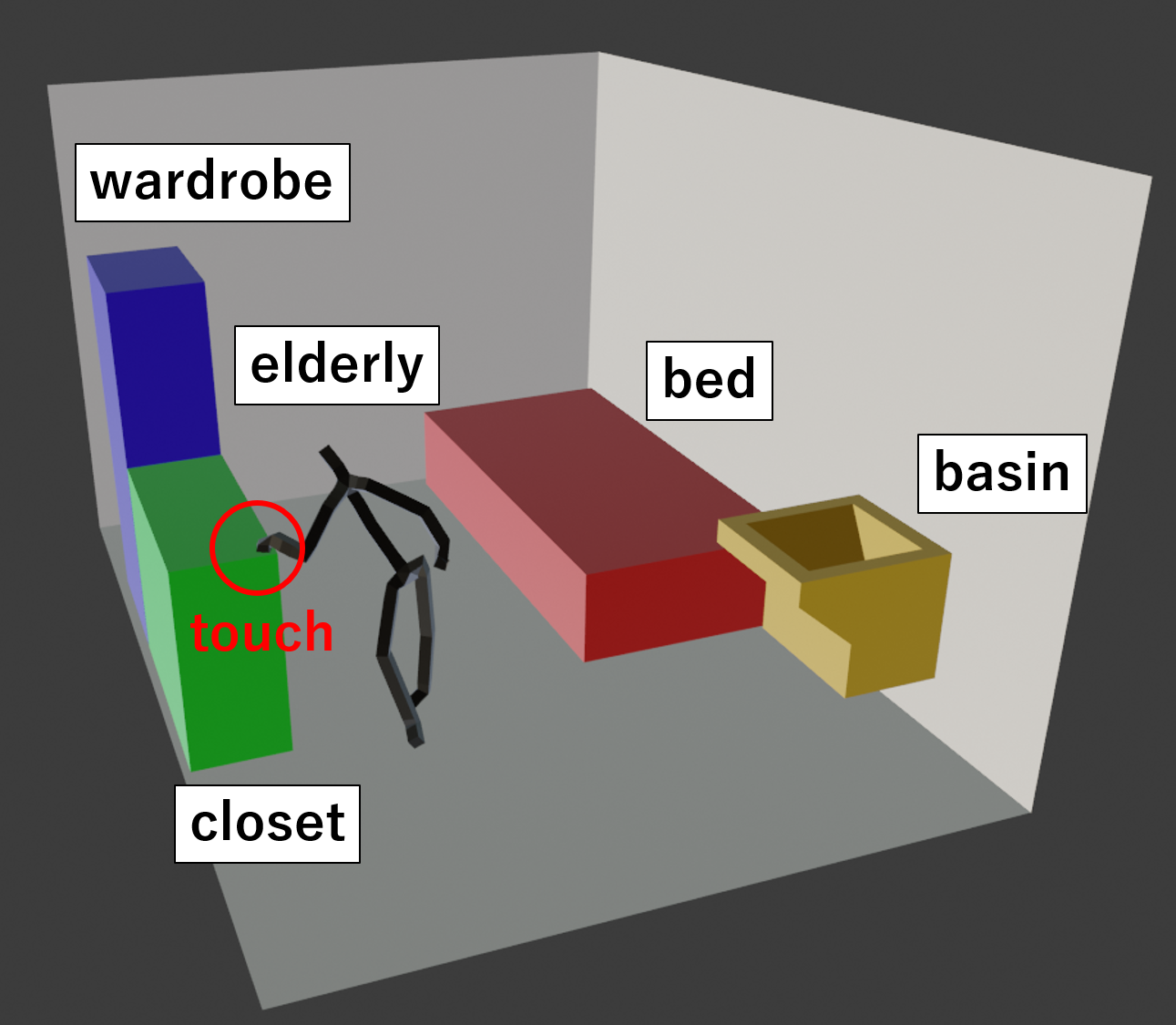
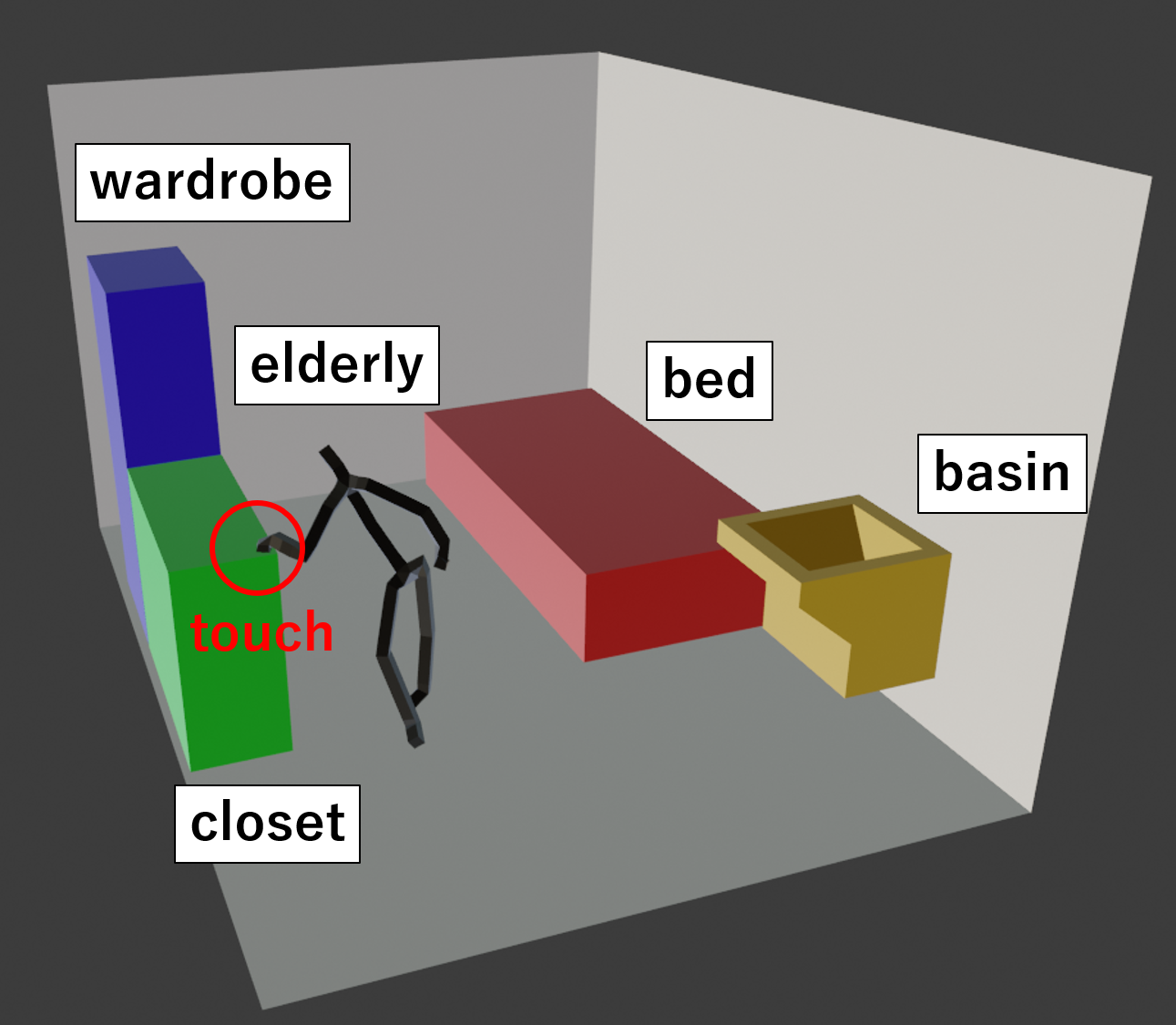
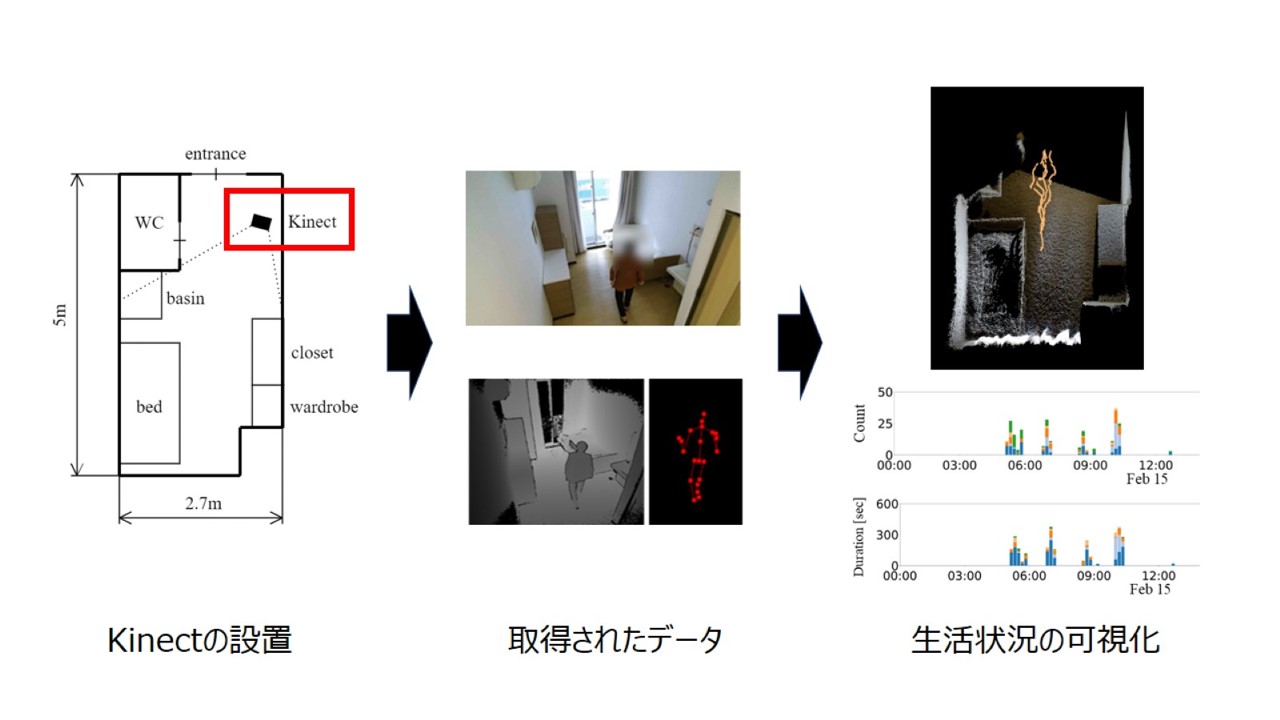
| 介護施設における個室内での 高齢者の行動把握分析手法の開発 |
自律移動ロボットに搭載する マニピュレータ |
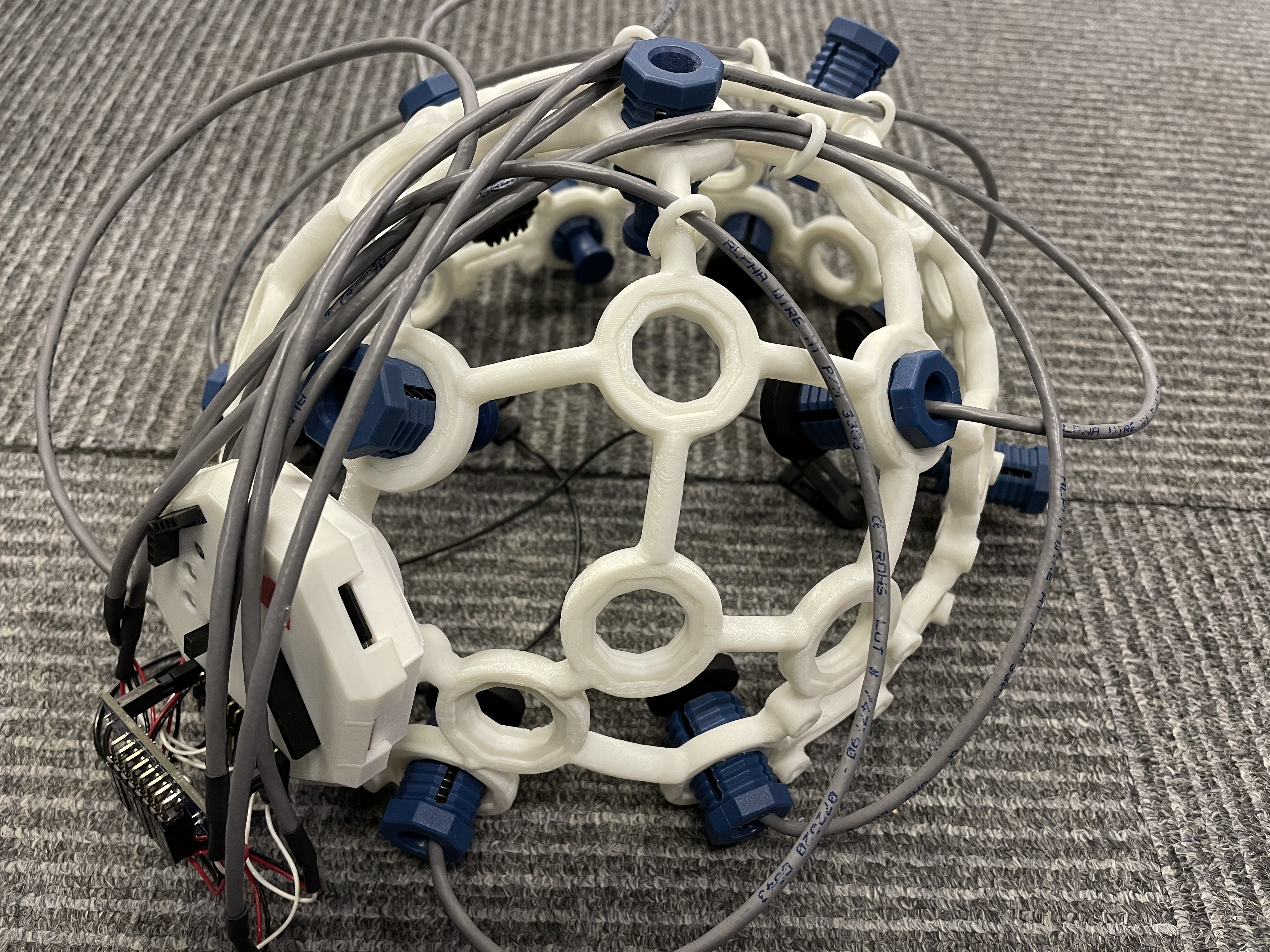
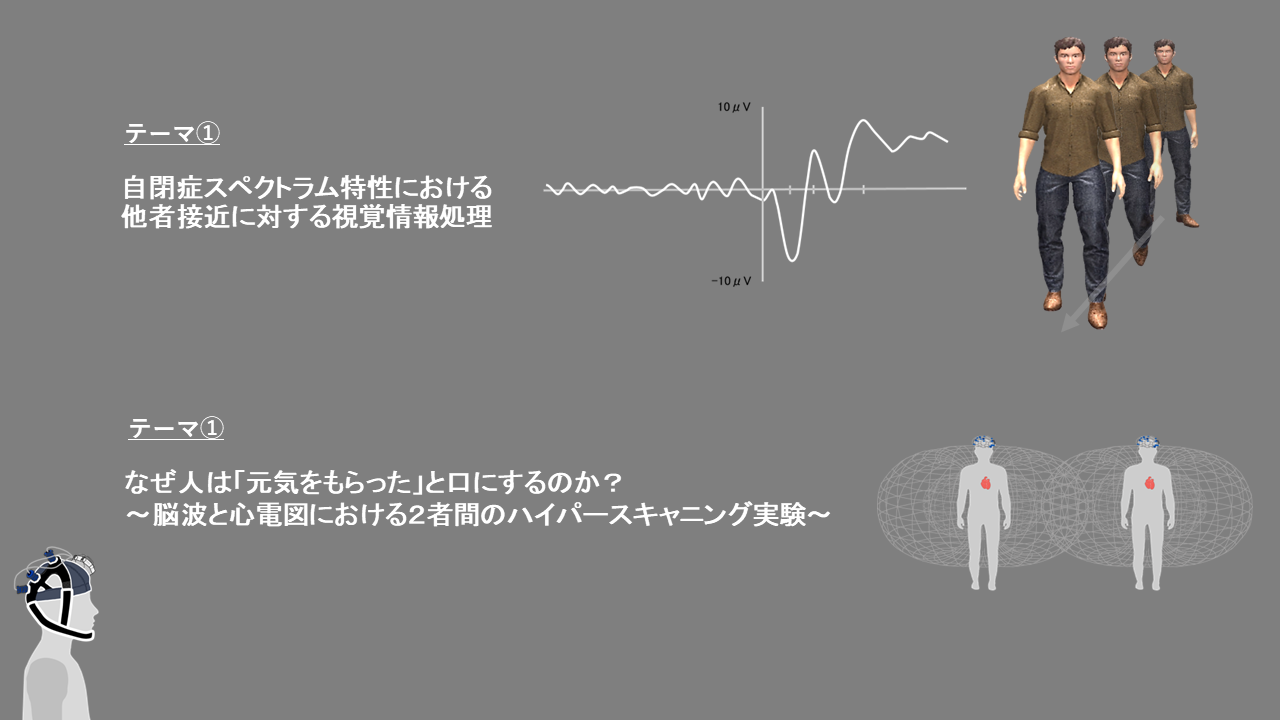
自閉症スペクトラム特性に関するすれ違い動作時の脳波研究 |

 |
 |
 |
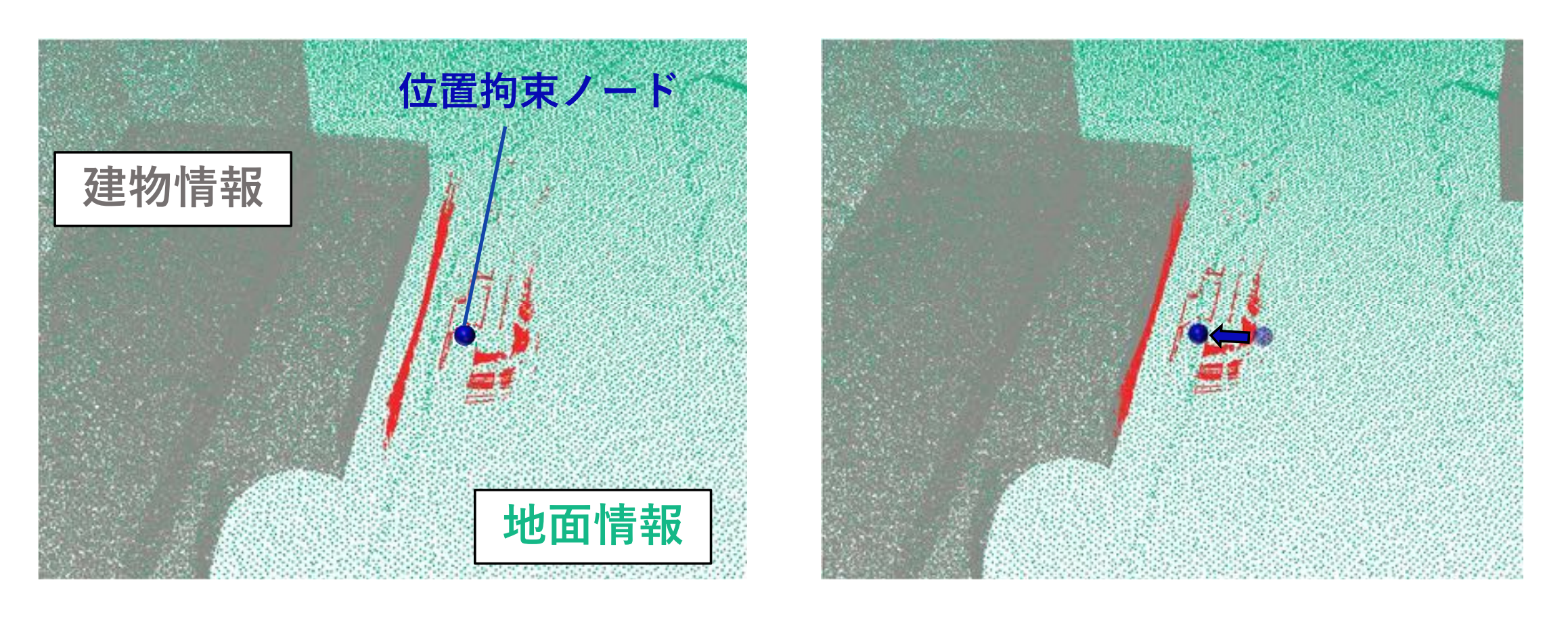
|---|---|---|
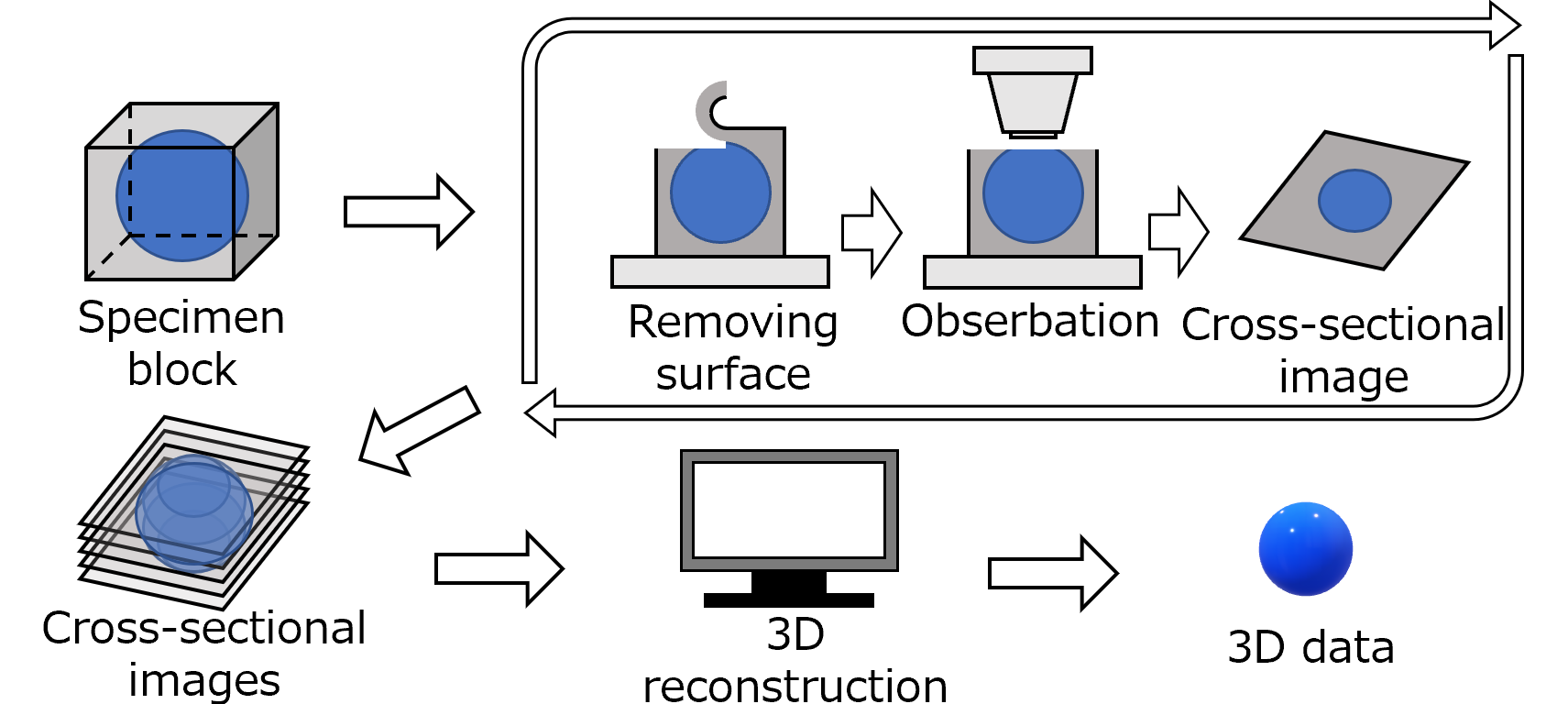
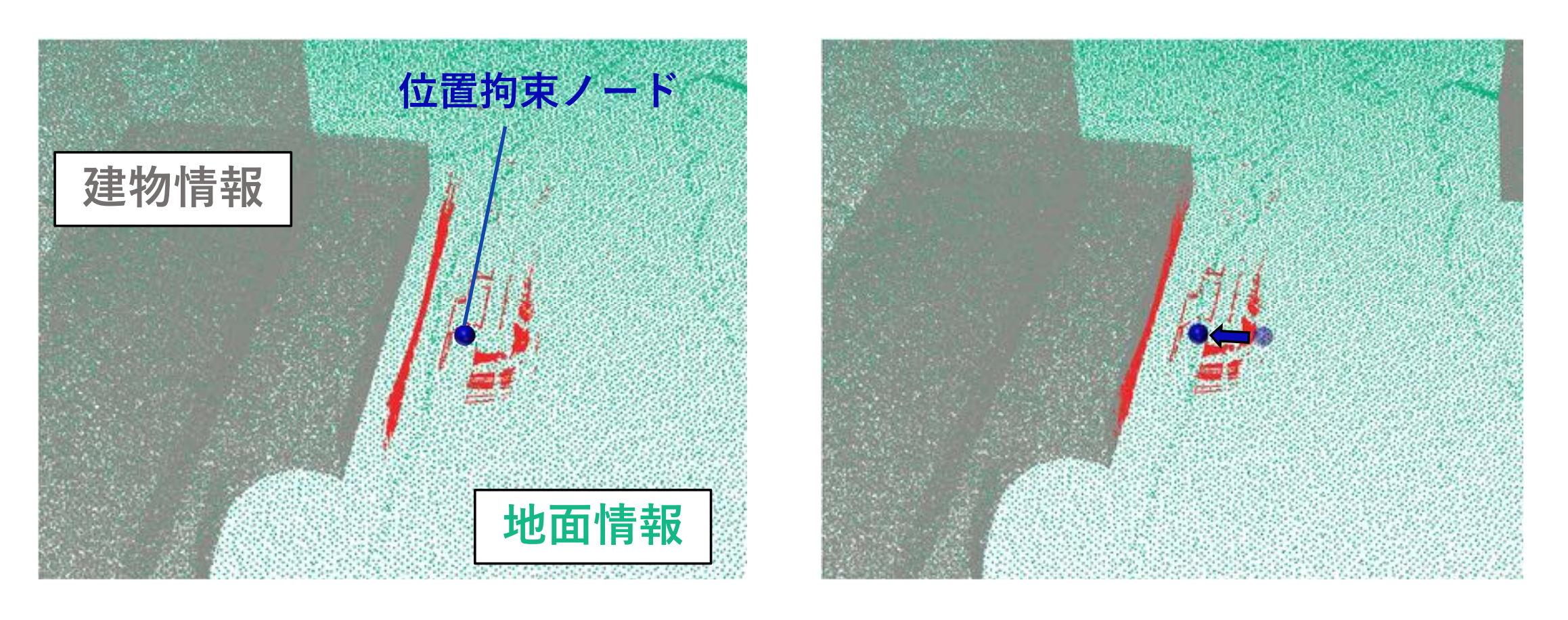
| RGBDカメラと仮想センサを使用した高齢者の生活状況把握システムの開発 | ロボットの自律移動に向けた電子地図に一致する3次元地図作成 | 走査型電子顕微鏡内小型切削装置の開発と改善 |