近年、トラック運転手の人手不足と長時間労働による負担増加が問題となっています。これを解決するために、セミトレーラ連結車の運用による物流の効率化が期待されています。セミトレーラ連結車はトレーラとトラクタが一点で連結しているため、後退時に複雑な挙動を示すことが知られています。本研究では,模型実験車両を製作し、それを用いて後退自動駐車を行うことを目的としました。実験車両に使用したセンサーは連結角を取得するためのポテンショメータと、周辺環境を取得するための広角カメラ3台です。画像処理による自車位置推定と連結角の情報により経路作成を行い,フィードバック制御で経路追従を行います。自車位置推定は3台のカメラから得られた画像から鳥瞰画像を作成することによって行います。実際に製作した模型実験車両を用いて自動駐車実験を行い,結果として自動駐車に成功することができました。
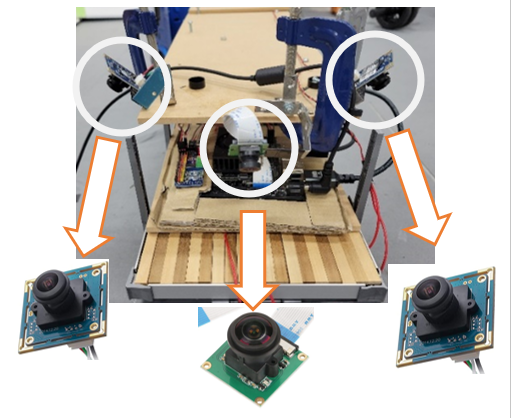
カメラの設置位置
セミトレーラ外観2
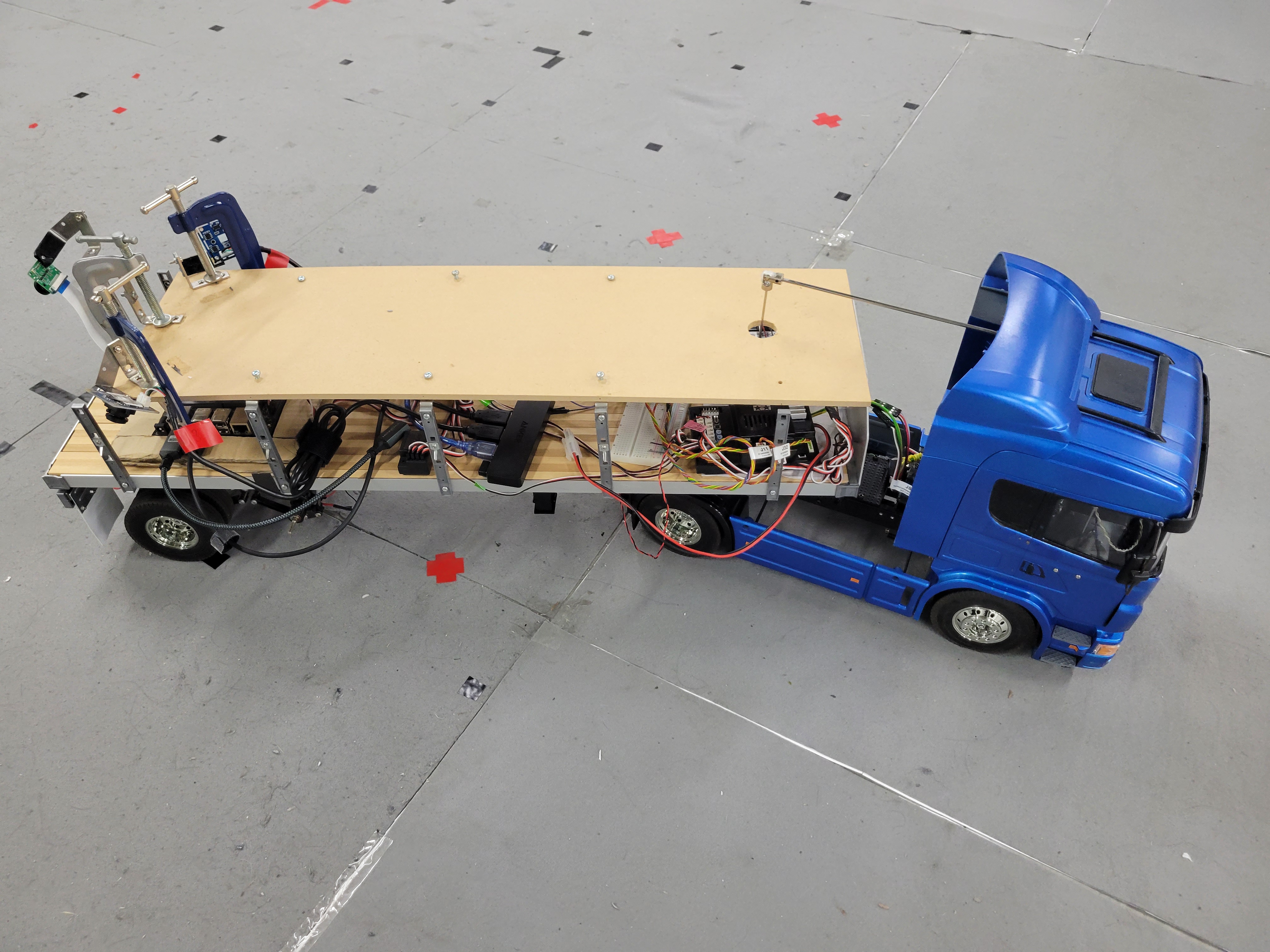
セミトレーラ外観1
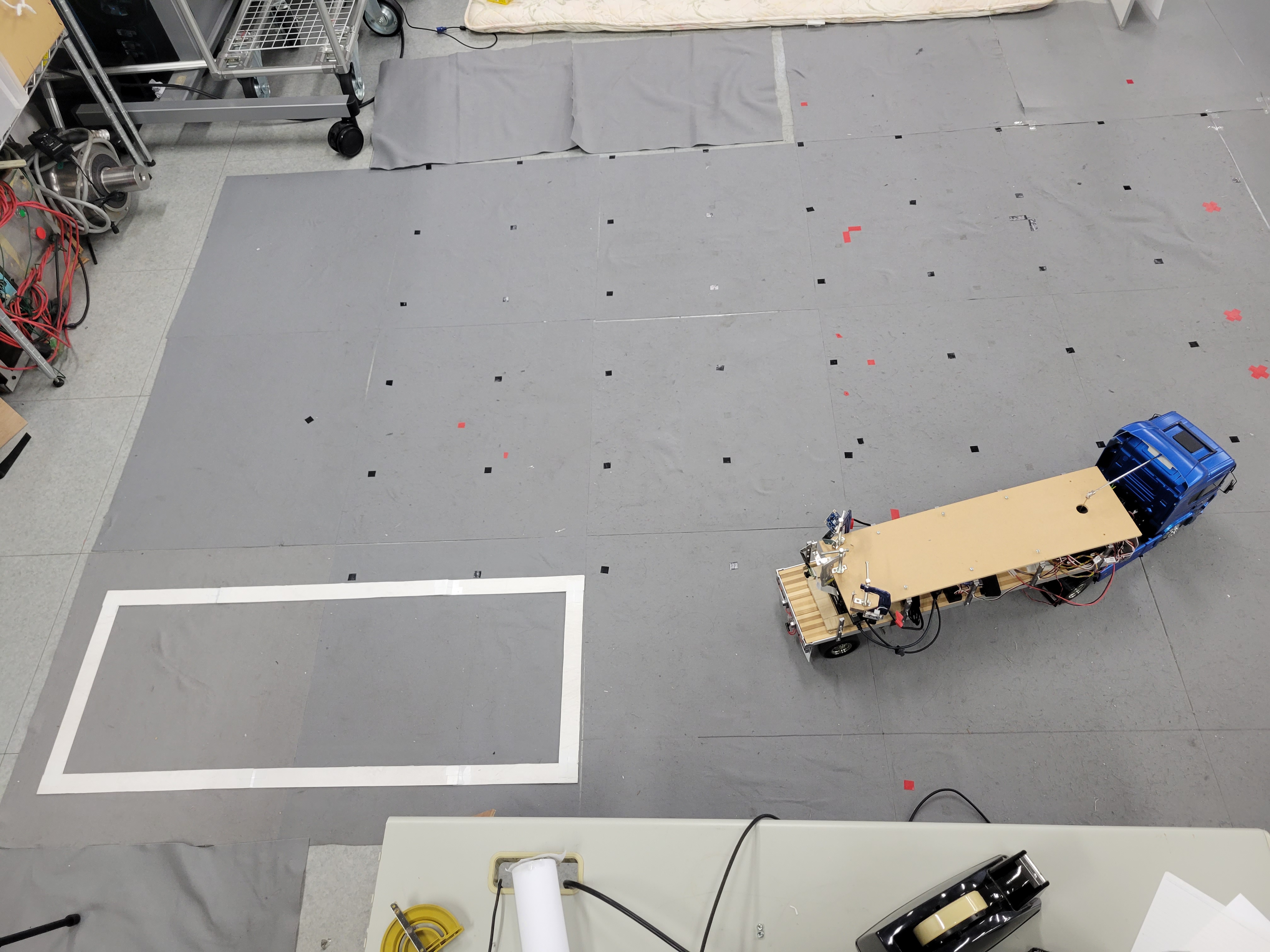
駐車イメージ
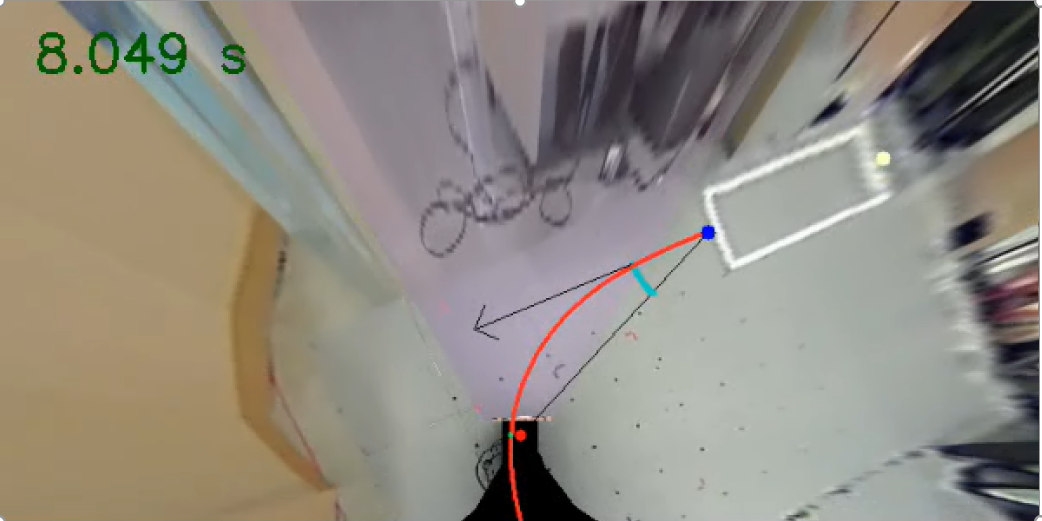
鳥瞰画像2
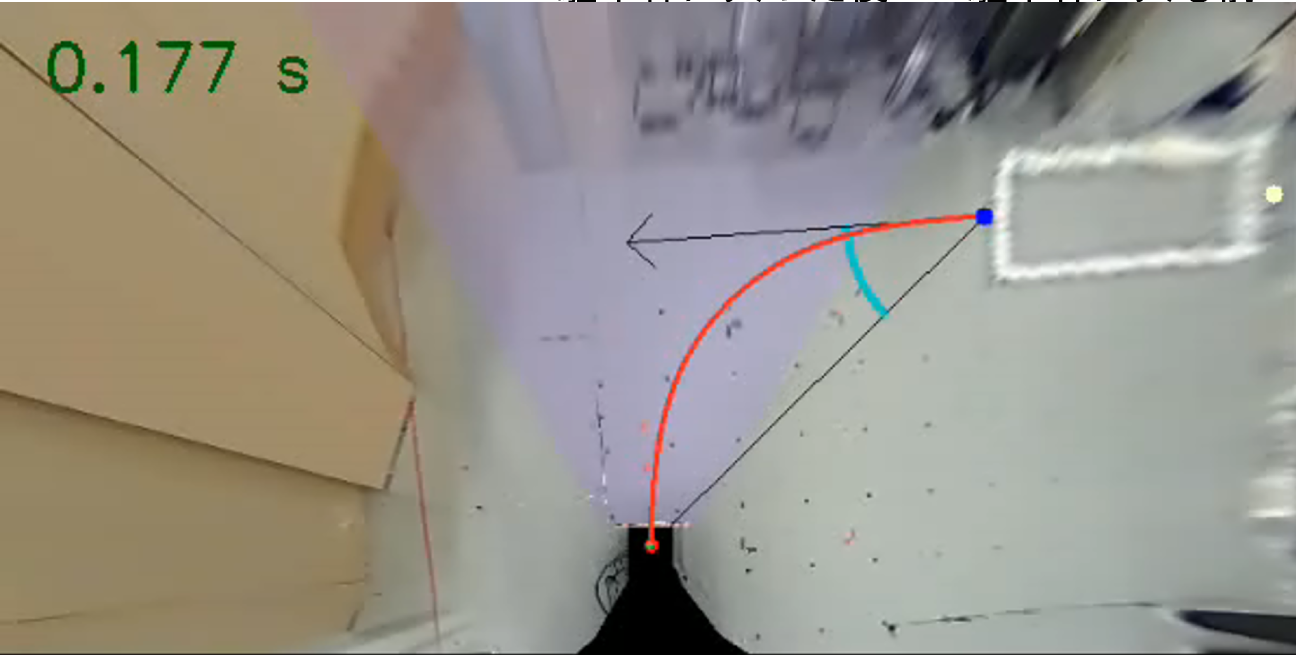
鳥瞰画像1
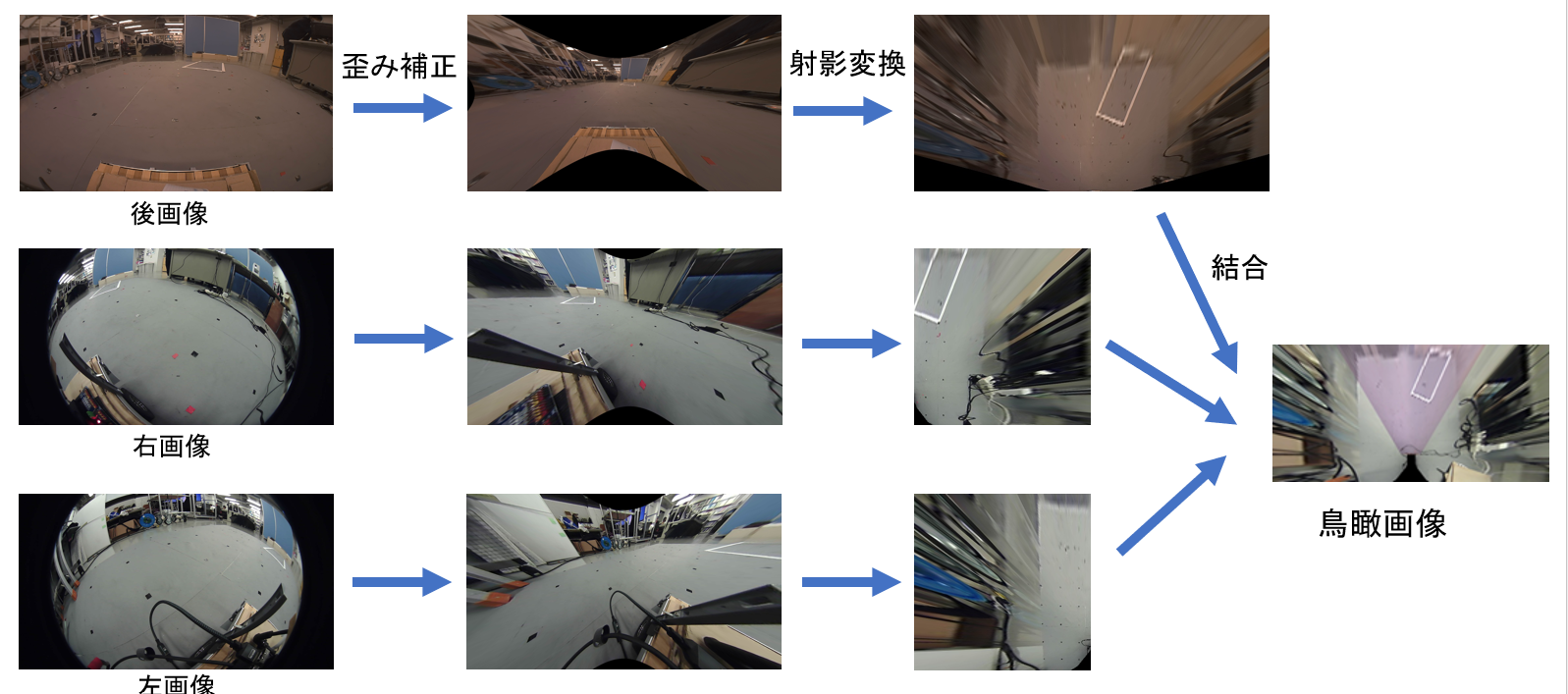
鳥瞰画像の作り方