鉛直フランジ車輪を含む2次元平面車両モデルを用いた地震時の鉄道車両の脱線挙動解析
Derailment Behavior Analyses of Railway Vehicle during Earthquake by Two‐Dimensional Planar Vehicle Model including Wheels with Vertical Flanges

地震による脱線事故の防止のため,地震時の車両挙動を調べることが重要です.本研究では自由度を減らして単純化したモデルでの,車両挙動の再現に取り組みました.
Kapitzaの振り子を用いた倒立振子型車体傾斜車両の検討
Study on Inverted Pendulum Type Tilting Rail Car using Kapitza's Pendulum

在来線を高速化する方法の1つである振り子車両について,アクチュエータの制御を必要としない車両の提案と,シミュレーションによる検討を行っています.
操舵を用いた障害物自動回避システムに関する研究
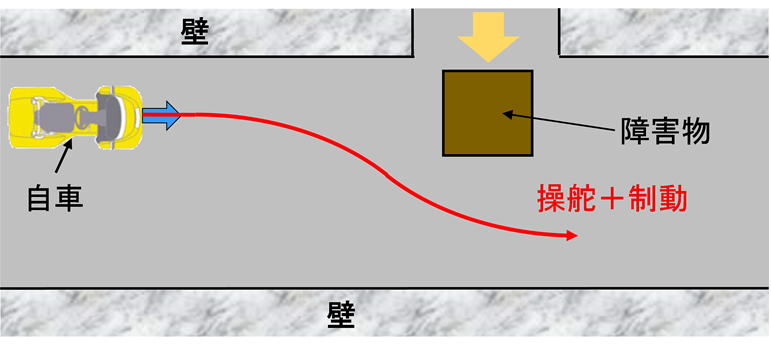
歩行者の飛び出しといった,緊急場面における安全技術として,自車位置と障害物位置から目標回避 軌道を生成し,自動でハンドルを切ることでその軌道に追従させ障害物を回避するシステムの研究を行っています.
歩行者の不安全行動に対する危険予測運転に関する研究
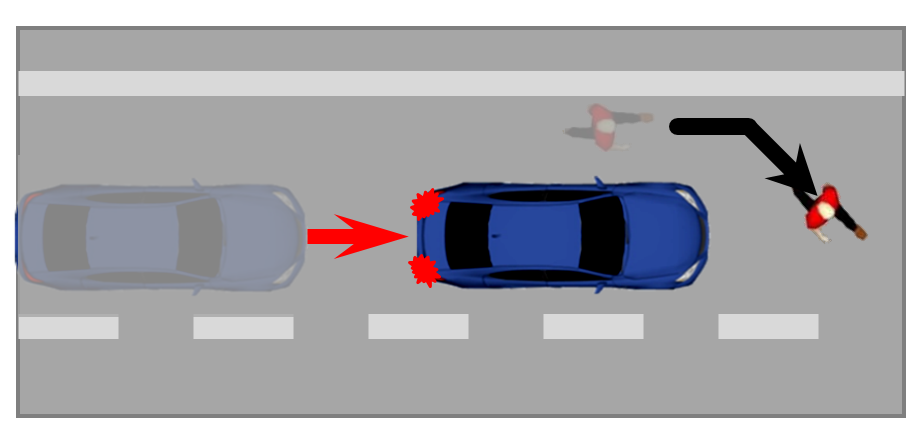
自車が歩行者を追い越す場面等において,歩行者が急に飛び出してくるなどの危険性(リスク)があります.そこで危険性を予測し,衝突することがないように,自車の速度の上限などの安全基準を設け,この基準に従う車両制御システムの研究を行っています.
電磁ダンパを用いた運動・制御手法の開発
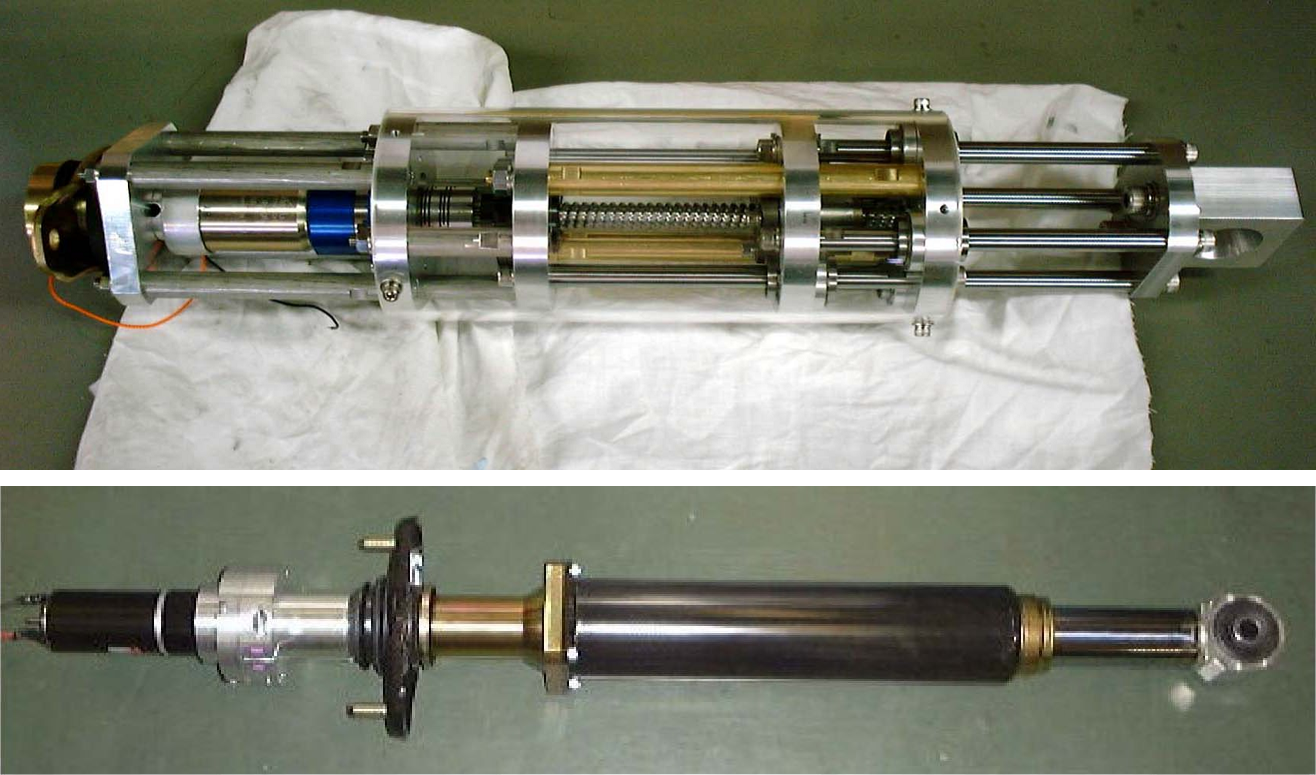
電磁ダンパは直流モータ・ボールねじから構成され,モータに繋ぐ電子回路により様々な力学特性を設計可能,複数のダンパを導線で容易に連携可能という特徴があります.これらの特徴を応用した電磁ダンパ連携手法の考案や,回路による新たな車体振動抑制手法の開発に取り組んでいます.
ドライブレコーダ映像の画像解析手法の研究

タクシー車両に搭載されたドライブレコーダで得られた交通事故やヒヤリハット事例の映像をデータベース化し,交通安全の研究が進められている.ところが現状では,映像から事故状況を人間が判断する必要があり,大量の映像を解析するのは困難である.そこで,映像のデータベース化を自動化する研究を行っています.
アクセルペダル振動によるドライバへの情報提示手法の研究
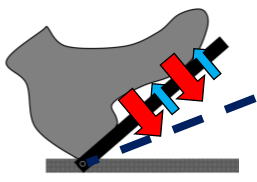
交通渋滞の解決には適切な速度情報の提示が有効です.そこで本研究ではアクセルペダルを振動させて「踏め」「戻せ」などのペダル操作情報をドライバに与えて,速度誘導を行うためのシステムを研究しています.
その他
その他にも以下のような研究を行っていました.