歩行者飛び出しに備えた潜在リスクポテンシャルに基づく車両挙動制御アルゴリズムの研究
Study on Vehicle Control Algorithm based on the Risk Potential to Provide
for Running-out of Pedestrian
現在,日本における交通事故による死者数の割合では,歩行者が最大の割合を占めています.歩行者は自動車乗員とは異なり衝突安全装置に守られていません.そのため,車両と衝突した場合には重大な被害となる可能性が高く,衝突事故発生そのものを未然に防ぐことが重要であると考えられます.本研究では,駐車車両や交差点付近の壁の奥などのドライバから見て死角となっている部分から飛び出してくる歩行者や自転車との衝突事故の予防を目的とし,ドライバの死角領域からの歩行者や自転車の飛び出しを予測し,予め減速や操舵を開始することで飛び出してくる歩行者および自転車との衝突を回避するための車両挙動の制御方法についての検討を行いました.
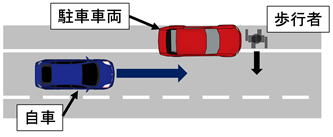
対象場面
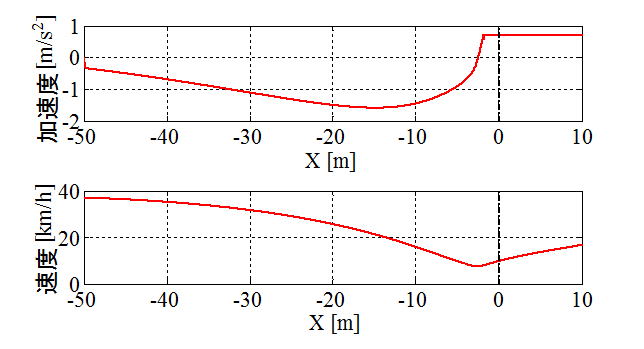
駐車車両脇通過時の加速度・速度
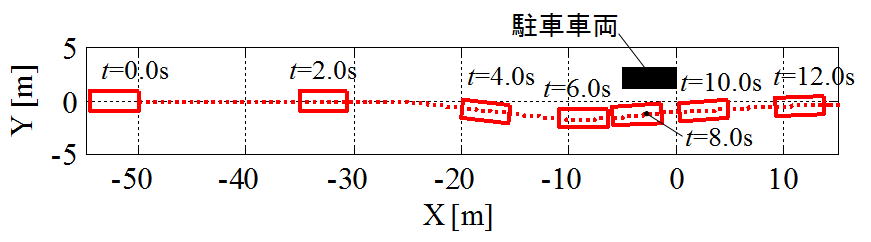
駐車車両脇通過時の走行軌跡
危険予測運転システムに起因する道路の交通処理能力低下の定量的評価
Estimation of Traffic Capacity Deterioration caused by Hazard Anticipatory
Driving System
先行研究において、物陰からの歩行者・自転車の飛び出しを予測し,車両に減速を行わせる危険予測運転システムが提案された。しかし、直接検知できない歩行者との衝突を予測し,回避するために車両に減速を行わせるシステムであるため、システムを搭載した車両は搭載していない一般の車両に比べ、減速の機会が増加し、交通流に悪影響を及ぼすことが懸念される.そこで,本研究では,1時間当たりに道路の断面を通過することができる車両の最大数である交通容量の概念を用いて,交通流に危険予測運転システム搭載車が与える影響を調査した.危険予測運転システム搭載車が危険予測運転システム非搭載車に混入して走行することにより,物陰の脇の道路断面で低下すると考えられる交通容量を,走行している全車両に対する危険予測運転システム搭載車の混入率を変化させ,シミュレーションにより求めた.
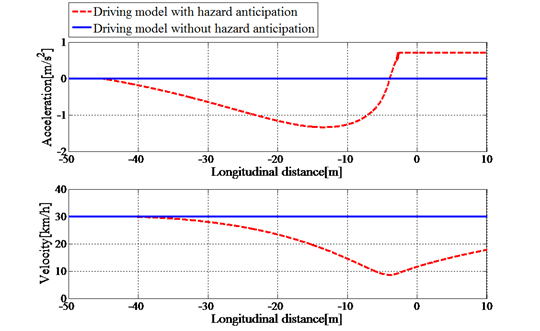
危険予測運転システム搭載車と非搭載車の速度,加速度比較
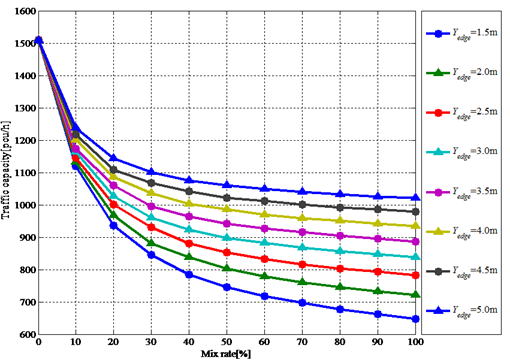
混入率・遮蔽物までの側方距離毎の交通容量

混入率20%時のシミュレーション

混入率80%時のシミュレーション
狭路における歩行者追い越し時の安全運転のための車両制御手法の研究
Study of Vehicle Control Method for Safe Operation of when Overtaking Pedestrians
in Narrow Road
近年,国内外で自動運転の公道実験が行われつつあるように,自動運転は注目を集めています.この自動運転の実用化において,自動運転の安全性を保証する必要があります.人間のように認知・判断・操作のミス,すなわちドライバのヒューマンエラーによる事故は,自動運転では原理的に起りません.しかし,飛び出しなどの歩行者のエラーには,自動運転であっても事故を物理的に回避できません.そこで,事故リスクを予め想定した運転技術である危険予測運転技術を取り入れます.本研究では障害物回避手法であるポテンシャルフィールド法を用いた車両制御手法を提案しています.そして,前方を直進する歩行者を追い越すシミュレーションを行い,提案手法による車両制御が安全速度を満たしているか検証を行いました。
車両システムのブロック線図
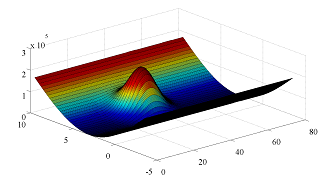
歩行者追い越し時のポテンシャル(3D)
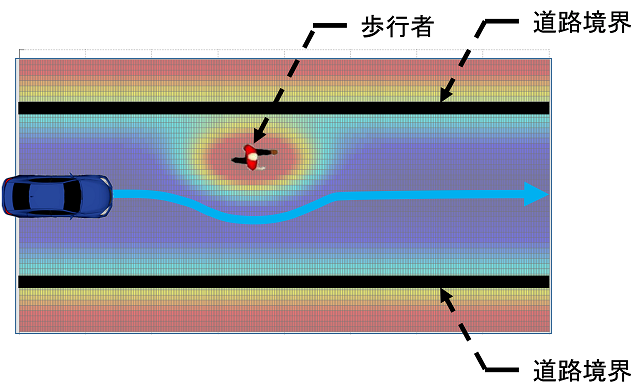
歩行者追い越し時のポテンシャル(2D)
従来手法との比較