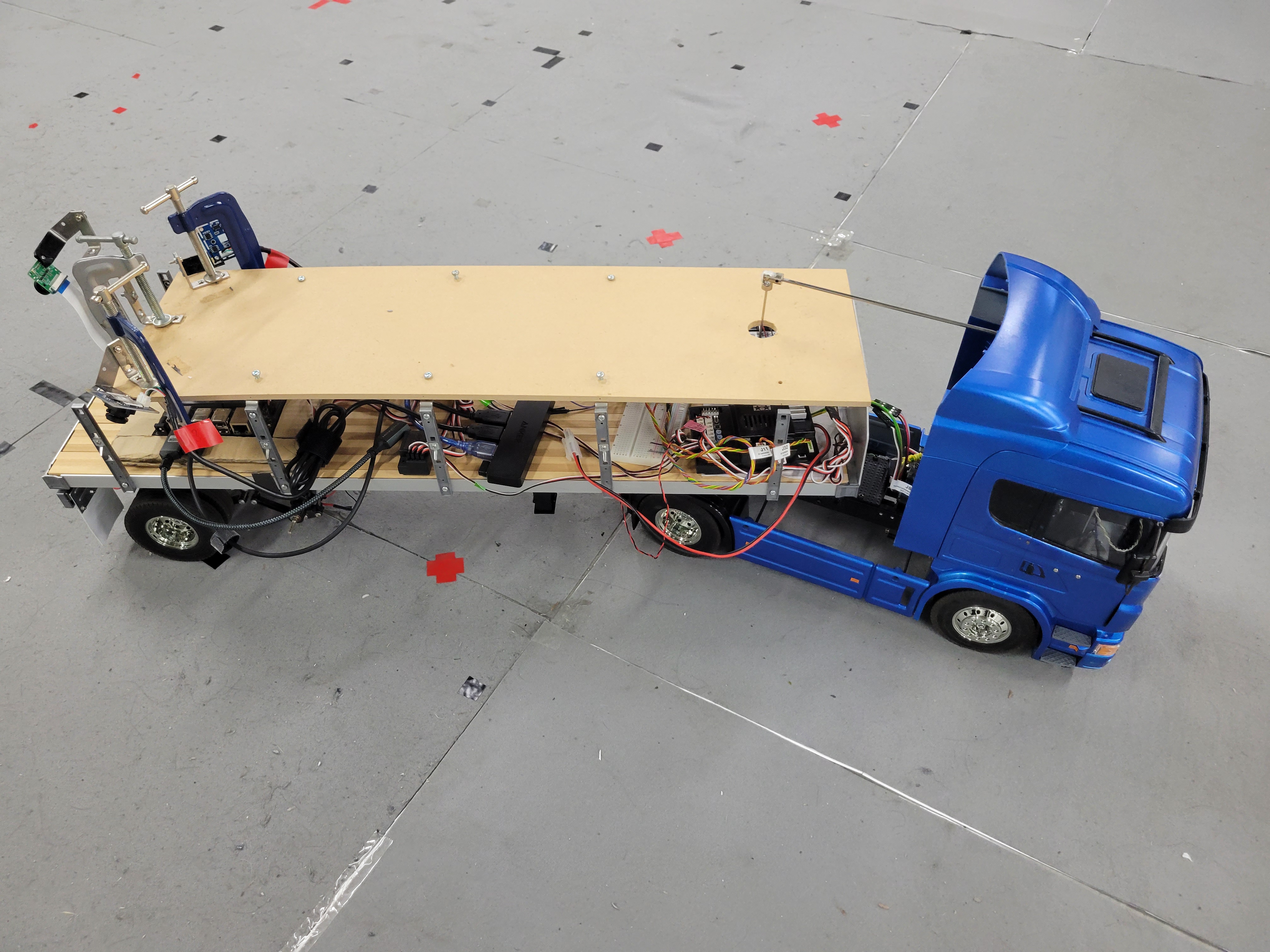
広角カメラを用いたセミトレーラ連結車の後退自動駐車
Automated Backward Parking of Semi-Trailer Truck using Wide-Angle Cameras
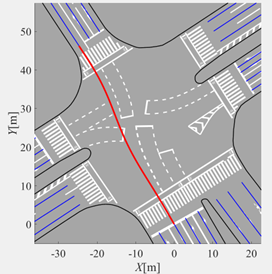
狭隘L字路における反復切り返しを用いた走行経路生成手法
Driving Path Generation Method using Repetitive K-turn on Narrow L-shaped Road

アクティブサスペンションを用いた地震時の鉄道車両脱線防止制御の可能性検討
Feasibility Study of Derailment Prevention Control for Railway Vehicles during Earthquakes using Active Suspension

斜めフランジ車輪を含む2次元平面車両モデルを用いた地震時の鉄道車両の脱線挙動解析
Derailment Behavior Analyses of Railway Vehicle during Earthquake by Two-Dimensional Planar Vehicle Model including Wheels with Angled Flanges

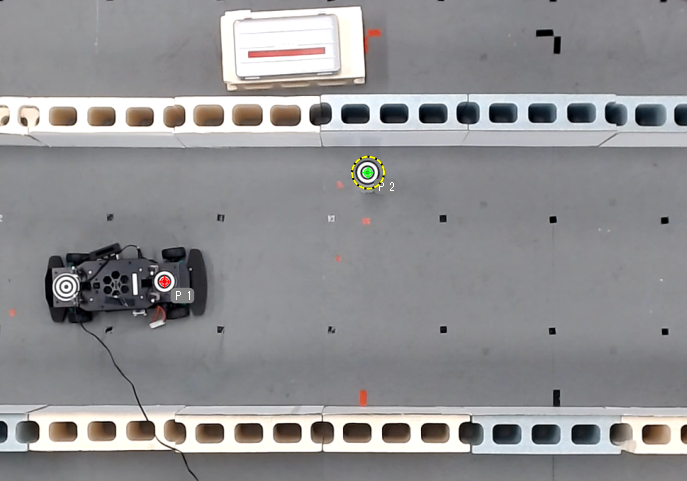
狭路での歩行者追い越しにおけるLiDARを用いた道路境界と歩行者の認識手法
Recognition Method of Road Boundaries and Pedestrians using LiDAR for Overtaking on Narrow Roads
始点と終点の曲率を考慮した梁のたわみ曲線による経路生成手法の研究
Study on Driving Path Generation Method using Deflection Curves of Beams
Considering the Curvature of Starting and Ending Points
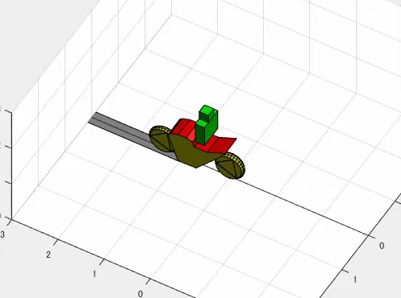
ライダーのロール自由度を含む二輪車の5自由度運動力学モデルに関する研究
Study on 5DOF Kinematic Model of a Motorcycle including Rider's Degree of Freedom in Roll Direction