ドライビングシミュレータにおける立体視の効果評価
Elaluation of Effect of Stereoscopic Vision in Driving Simulator
ドライビングシミュレータは,特定の条件下で繰り返し自動車を走行させることを容易に行うことができるなどのメリットから、ドライバーの運転訓練や車両開発の現場などで用いられています.ドライビングシミュレータを用いて実験を行う場合,その前提として実車でのドライバーの感覚が再現されていることが重要であり,それが再現されていない場合では,その実験結果の信頼性が低下してしまうため、ドライビングシミュレータの現実感を向上させドライバーの感覚を実車運転時の感覚に近づける事が求められています.本論文ではドライビングシミュレータの現実感を向上させるために3D映像技術が有効であるかどうかを調べるため,ドライビングシミュレータの映像提示に3D映像技術を用いることで被験者の感覚にどのような影響を及ぼすかを調査しました.

ドライビングシミュレータ

実験環境(バーチャル空間)

実験環境(現実空間)
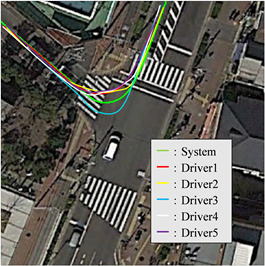
デジタル道路地図情報を用いた自動運転アルゴリズムに関する研究
Study on Autonomous Driving Algorithm based on the Digital Road Map
現在,我が国では高齢化と交通事故による人口減少が進んでいます.交通事故の原因の9割以上が人的ミスであるため,それをカバーする自動運転技術が不可欠であり,また急速に増加している高齢者などの安心・安全な移動を実現するための手段として自動運転システムの開発が注目されています.そこで,本研究では,出発地から目的地までの走行を自動で行う自動運転アルゴリズムとして,自動運転システム全体の負荷低減につながるメリットのある地図データを用いた自動運転に注目し,すでに一般化され,カーナビゲーションシステムなどの地図データの元になっているデジタル道路地図情報を用いた軌道生成手法とその軌道を追従する手法を提案し,自動運転車両走行シミュレーションによりその有効性を検証しました.
実験環境(現実空間)
実験環境(バーチャル空間)

実験環境(現実空間)
実験環境(バーチャル空間)
ステレオカメラを用いた歩行空間におけるPMVの走行可能領域検出
Accessible Reign Detection by PMV in Pedestrian Space by using Stereo Camera
PMVは車やバイクといった既存の乗り物よりも小さく,駅や施設内など既存の車両が進入できない場所で使用できることから近年注目されています.駅や施設内でPMVが走行する場合,歩行者や障害物との衝突の危険性が考えられることから,PMVの普及には安全に走行することを支援するシステムが重要であると考えます.本研究では障害物との衝突の危険性に着目し,PMVが安全に走行できる領域を判別する手法を提案しました.まず,ステレオカメラから車両周囲の三次元点群を取得します.タイヤが転がれる領域を障害物がない領域と考え,取得した三次元点群からタイヤか転がれる領域を判別します.タイヤが転がれる領域が車両位置から連続的に存在する領域を走行可能領域と判別します.
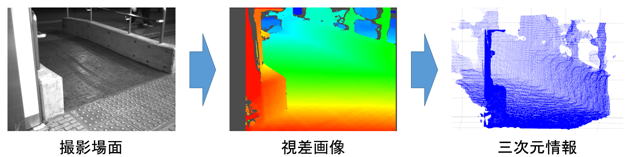
三次元点群の取得
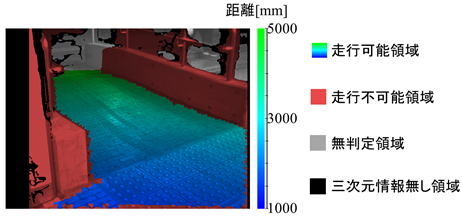
走行可能領域の判別結果
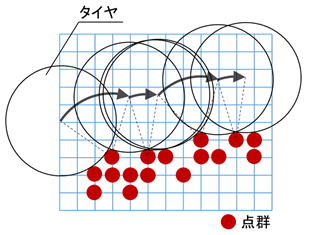
点群上でのタイヤ転動