障害物自動回避システムにおけるモデル予測制御を用いた軌道追従制御
Trajectory Tracking Control for the Autonomous Obstacle Avoidance System
by using Model Predictive Control
近年,衝突安全技術の発達によって,交通事故による死亡者数は大きく減少しました.しかし,交通事故発生件数は未だに多いのが現状です.これらは,ドライバの判断ミスや障害物の認知遅れといった,人間のミスに起因しています.そこで,私達は過去に,前方の障害物を自動で認識し,最適な回避行動を自動操舵によって行う前方障害物自動回避システムを提案しました.しかし,提案したシステムでは,回避のために算出された軌道に,車両を沿わせることができず,障害物に衝突してしまうことがありました.そこで,時系列的に少し先のことまで考慮できる制御,モデル予測制御という制御則を,自動回避システムに適用し,性能を評価しました.
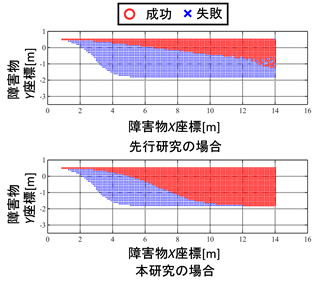
回避シミュレーション
障害物回避状況
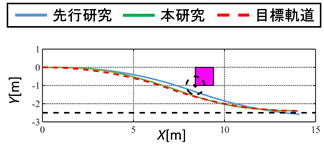
障害物回避軌道
操舵系の制約が前方障害物自動回避システムの性能に及ぼす影響の検討
Study on the Performance of the Autonomous Frontal Obstacle Avoidance System
under the Constraints of the Steering System
近年,衝突安全技術の発達によって,交通事故による死亡者数は大きく減少しました.しかし,交通事故発生件数は未だに多いです.これらは,ドライバの判断ミスや障害物の認知遅れといった,人間のミスに起因しています.そこで,私達は過去に,前方の障害物を自動で認識し,最適な回避行動を自動操舵によって行う前方障害物自動回避システムを提案しました.しかし,提案したシステムでは自動操舵でのハンドル操作に用いるモータのトルク限界や角速度の限界を考慮していませんでした.そこで,本研究ではそれらの限界を操舵系の制約として捉え,その制約が提案したシステムの性能に及ぼす影響の検討を行いました.
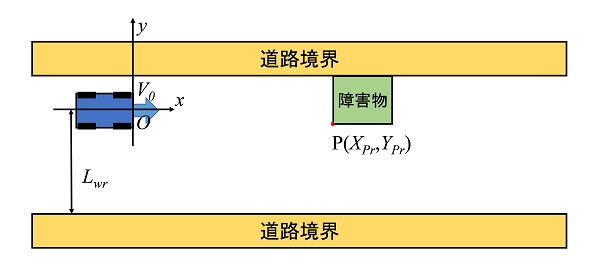
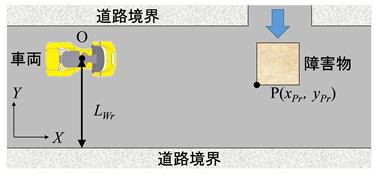
障害物回避の状況説明図
障害物回避軌道

障害物自動回避時の車両挙動