自動運転技術は米国SAEによりその段階をレベル0からレベル5まで区分されており,レベル2までに区分される運転支援システムを搭載した自動車は既に広く市場化がなされ,一般道路での使用が許されている.また,高速道路の渋滞時といった一定条件下での完全自動運転を行うレベル3の技術も2021年に本田技研工業株式会社により実用化が達成されている.しかし自動運転の最終目標であるレベル5の実現のためには自動運転技術の使用可能な領域を高速道路,一般道路に加え,ラストマイルと呼ばれる生活道路までの拡張する必要がある.生活道路は国土交通省により「車道幅員5.5 m未満の道路」とされており,そのような狭隘路では住宅街などで多く見られるL字路やT字路形状の道路も含まれる.これらのような走路形状は自動車教習所で必修技能となるクランクにも含まれ,通過に切り返しが必要な場合が多い.切り返しの伴う運転は,切り返しを開始する位置を明確に判断することが困難であるなどのことから苦手とするドライバーも多く,切り返しの伴う操作を自動運転化することができれば運転負担の軽減を見込むことができる.そこで本研究では,幅員が狭く通行に複数回切り返しを要するようなL字路を自動走行するための経路生成手法の提案を目的とする.また,走行シミュレーション,走行実験を行うことによる上記提案手法の実現性も確認する.
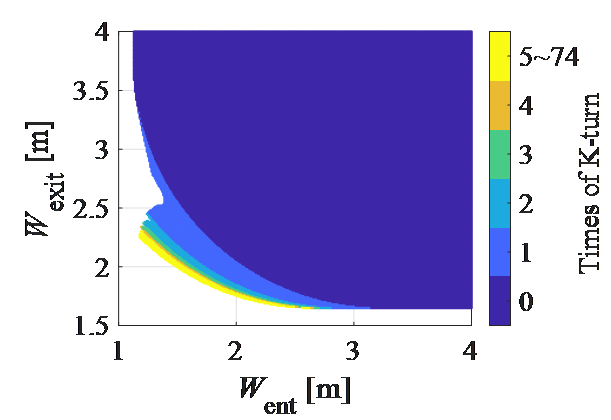
入口幅と出口幅の組み合わせによる最小切り返し回数の分布
経路生成シミュレーションの様子
RoboCar MV2を用いた実証実験の様子