在来線の利便性向上のために高速化を達成する方法として振り子式車両と呼ばれる車両の導入があります。しかし、振り子式車両は通常の鉄道車両よりも曲線での脱線の可能性が高くなるため脱線対策を考慮した車両設計をする必要があります。この問題を解決するべく完全車体傾斜条件と呼ばれる条件とこの条件を満たす車両の構造が提唱されました。しかし、この車両はアクチュエータの制御が必要でした。そこで本研究ではこの条件をアクチュエータの制御なしに達成する車両としてKapitzaの振り子を応用した倒立振子型の振り子梁を持つ車両を提案し、運動モデルを用いたシミュレーションでその実現可能性を検討しました。
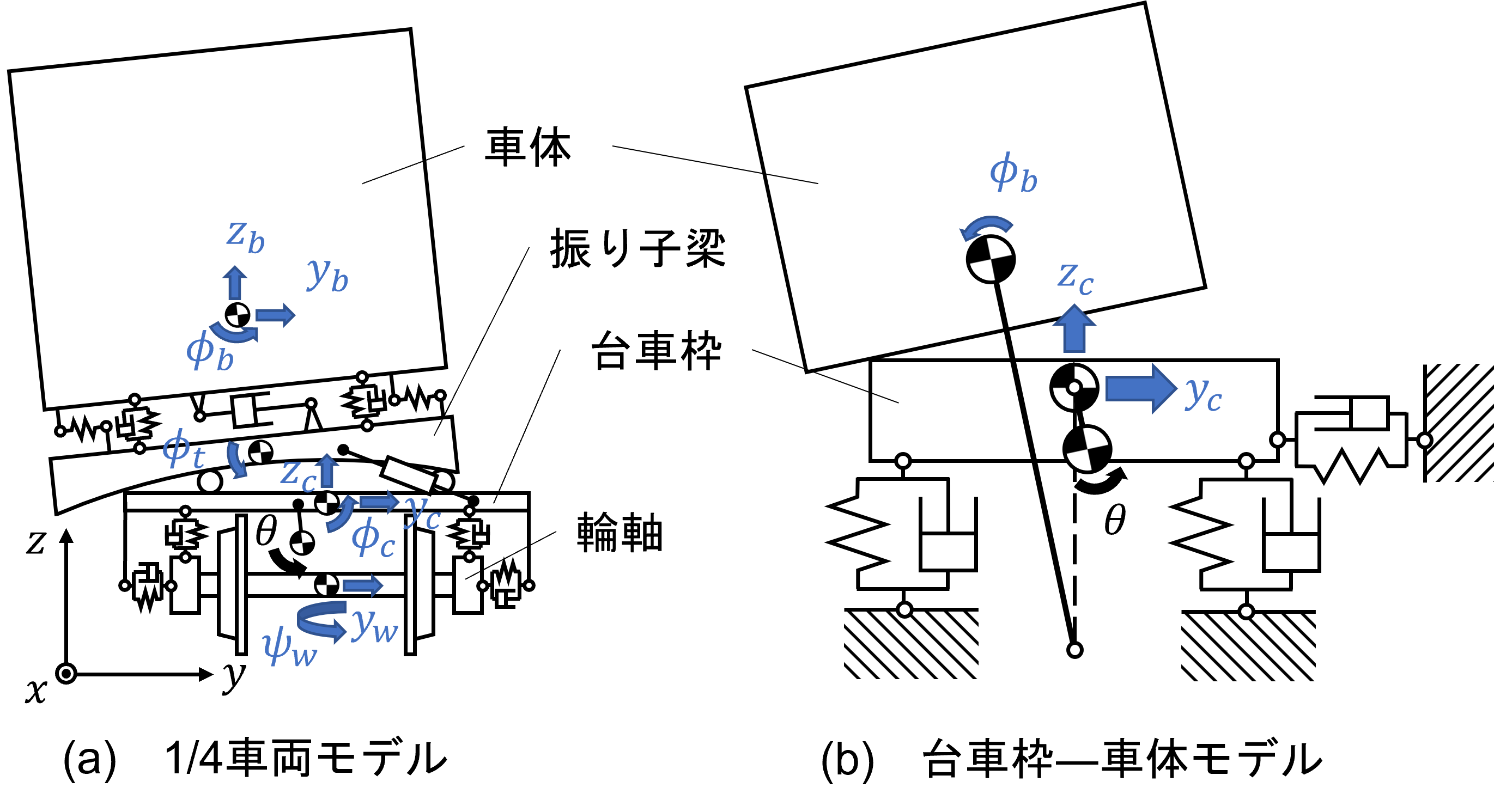
シミュレーションで使用した運動モデル
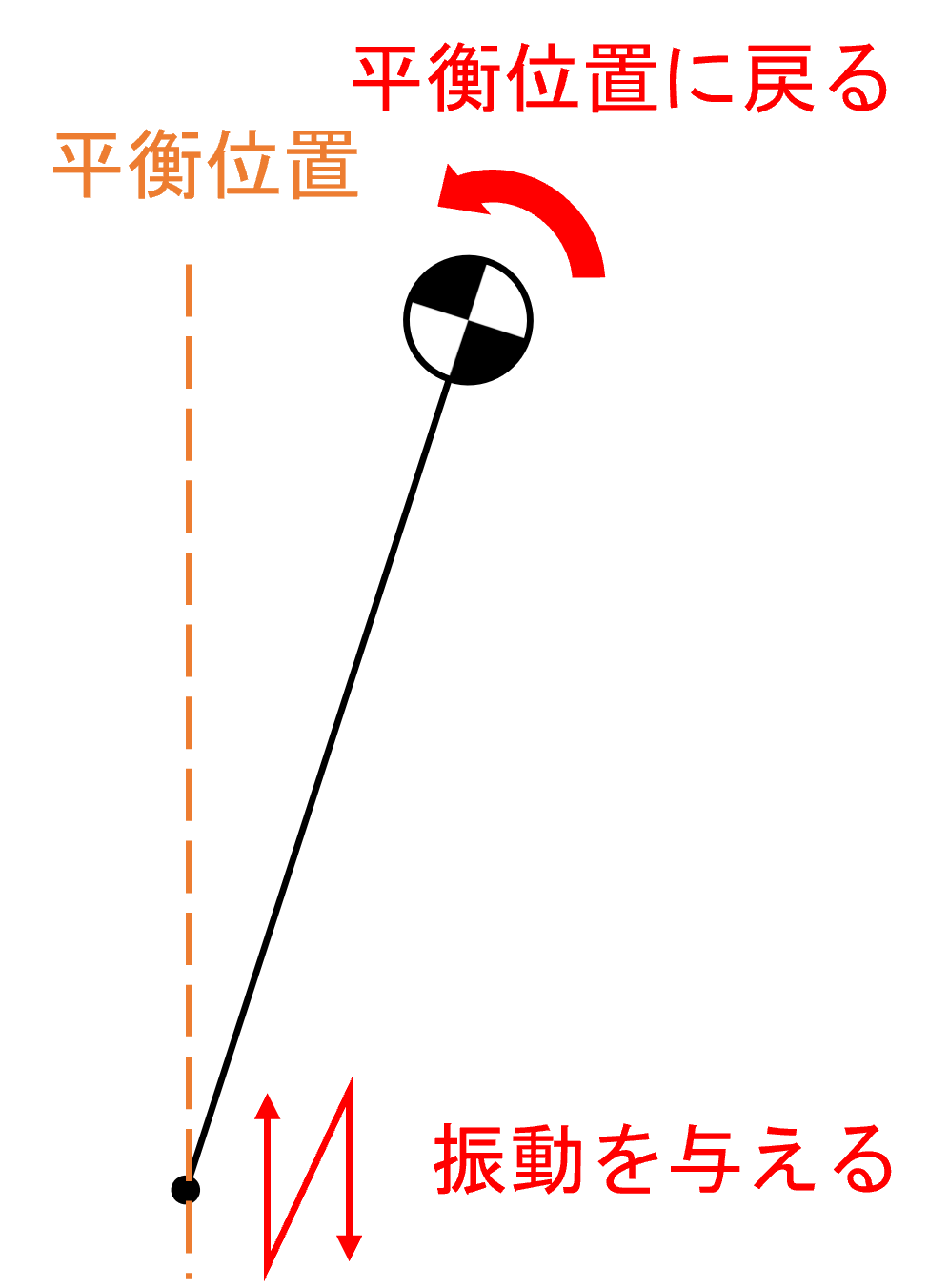
Kapitzaの振り子の概要

振り子式車両の問題点
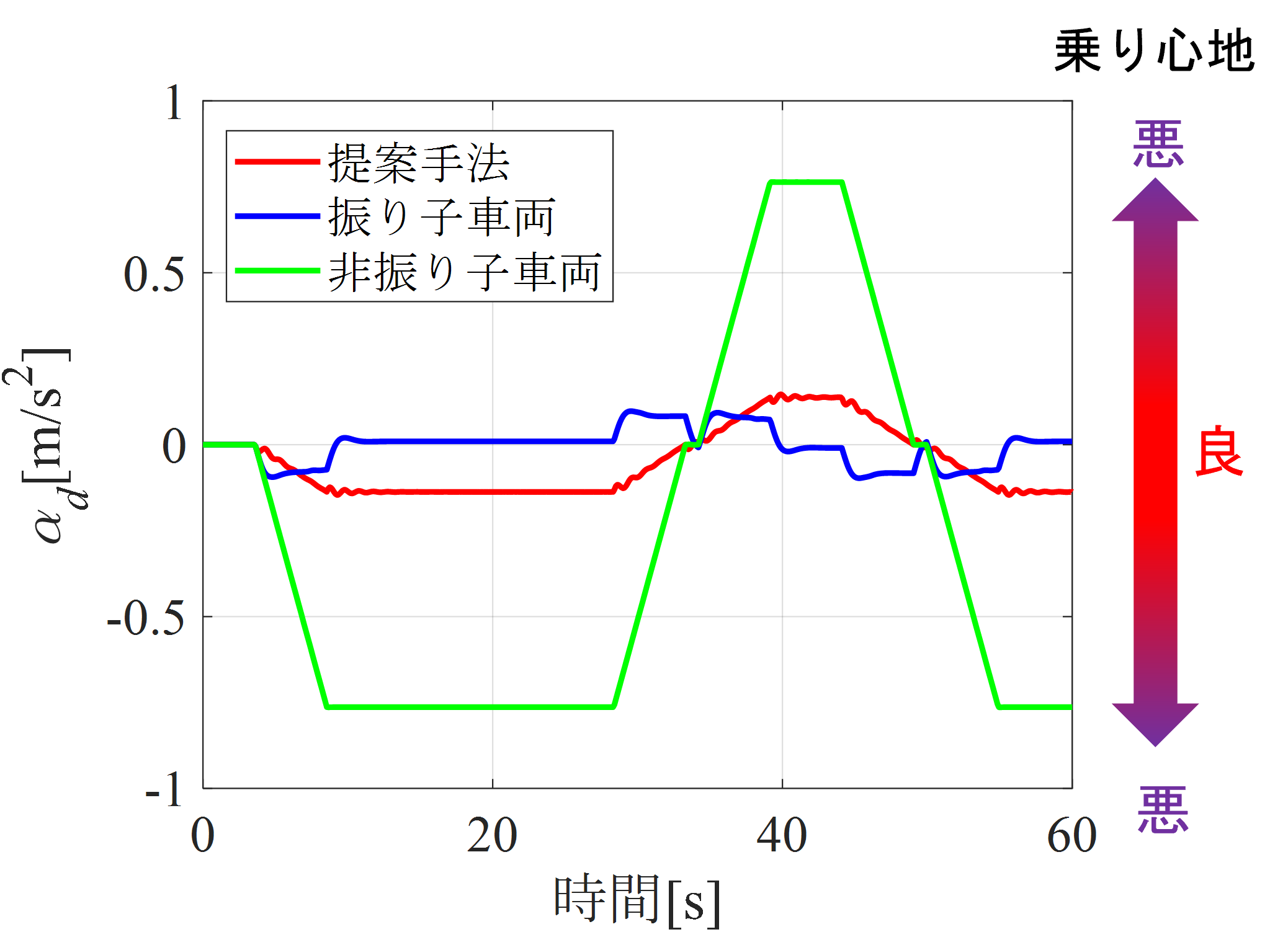
左右方向加速度(乗り心地)の比較
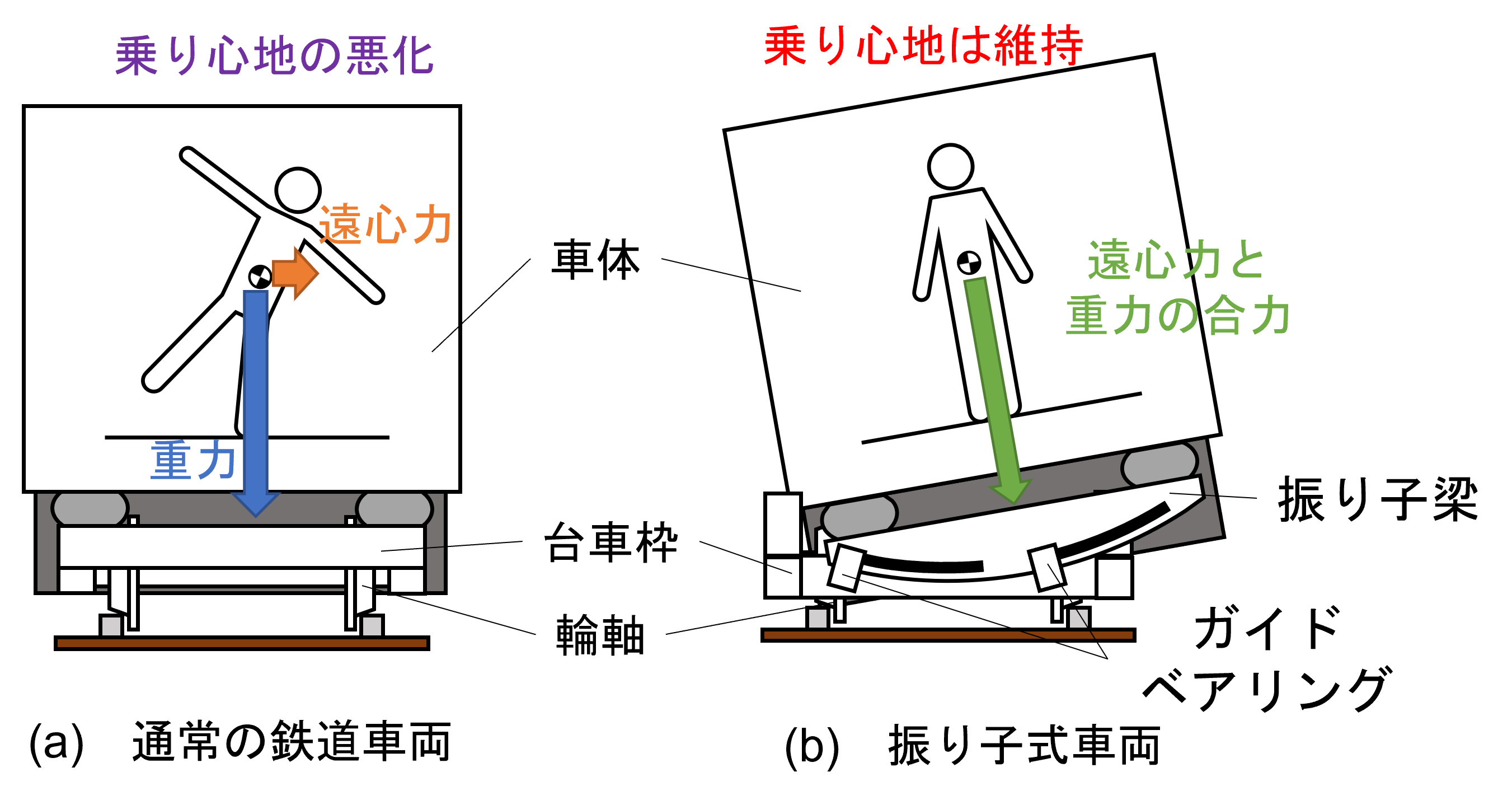
振り子式車両の利点
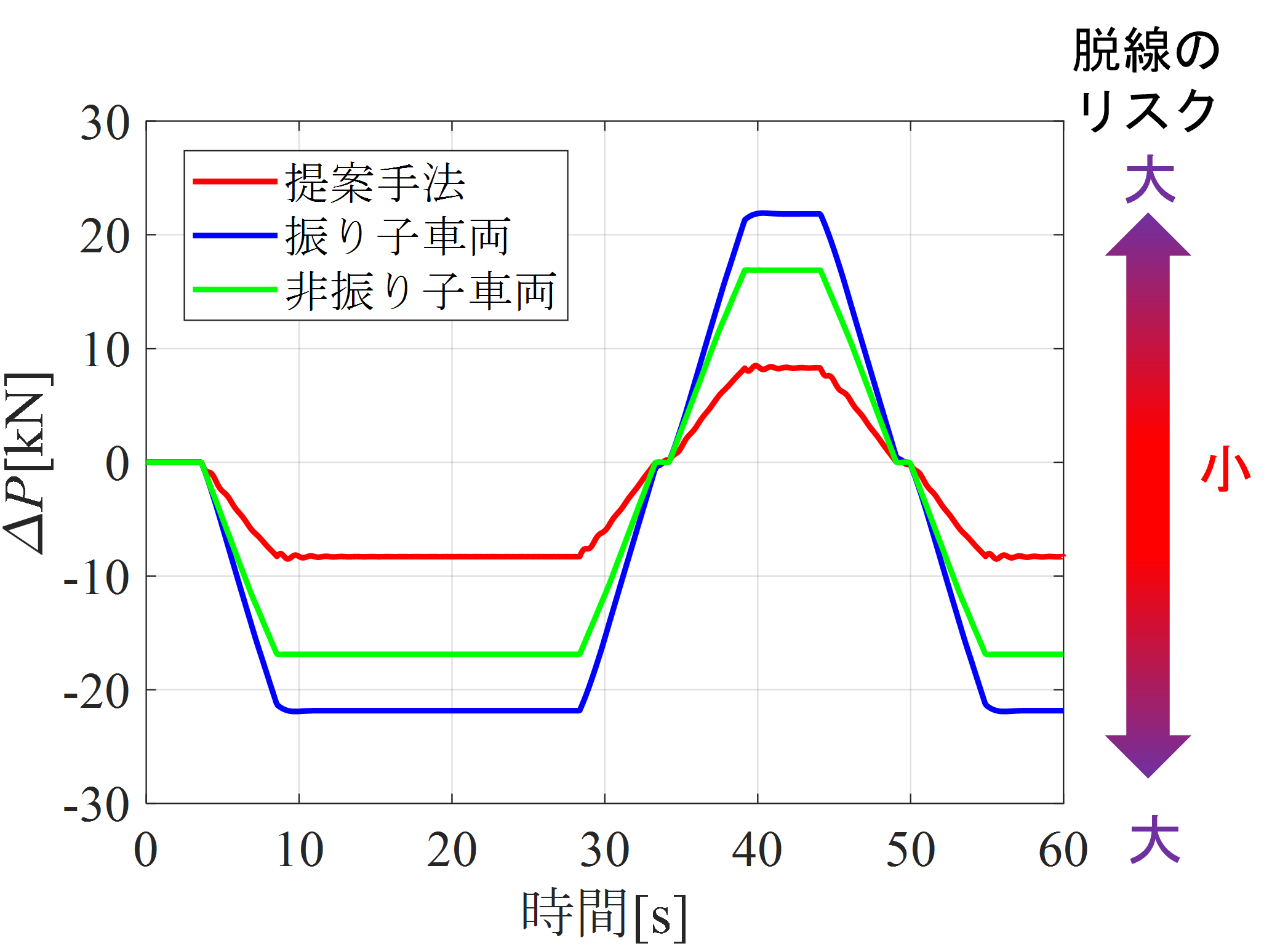
輪重不釣り合い量(脱線のしやすさ)の比較
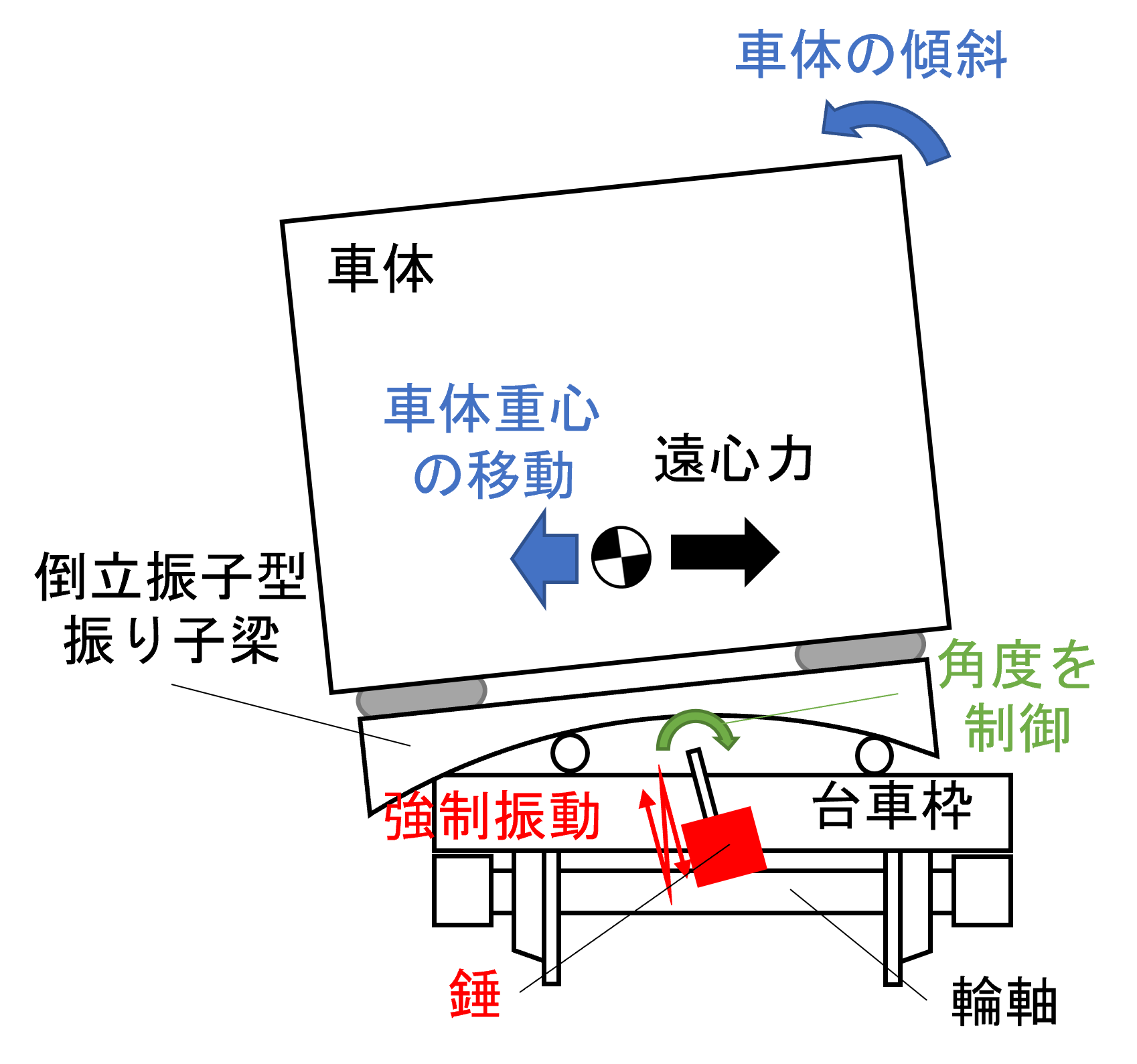
提案手法の概要