全国の交通事故における死者数は,2021年度までの10年間で減少傾向にあり,2012年度で4691人であった死者数は2021年度に2636人となった.一方,状態別交通事故死者数では,この10年間常に歩行中が最も多く,2021年度では全交通事故死者数の35.7%を占めている.こうした状況から歩行者の保護技術に近年関心が高まっており,日本では2021年11月以降に販売される新車への自動ブレーキ(AEBS)の搭載が義務化された.これは歩行者の飛び出しなどに反応し自動でブレーキをかけ衝突を回避するシステムであるが,歩行者の飛び出しが急である場合などに物理的に回避できない可能性がある. そこで,過去当研究室で歩行者を円滑に追い越す手法としてポテンシャルフィールド法が提案され,シミュレーションにおけるポテンシャルフィールド法の有効性が確認された.ただ,想定される直線単路において自車に対する歩行者位置・壁位置が既知であるという条件下であり,センシング手法は未提案であった.そこで,直線単路に歩行者が存在する場面において,LiDARを用いた歩行者・壁位置認識システムを設計した. 本認識システムを使用した,歩行者・壁位置が未知であるポテンシャルフィールド法による歩行者追い越しが安全に可能であることをMATLABシミュレーションにて確認した.また,実験車両RoboCar1/10を使用した実験で歩行者・壁位置の誤差を定量的に評価した.
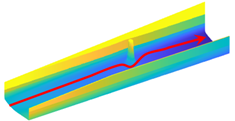
ポテンシャルフィールド法のイメージ
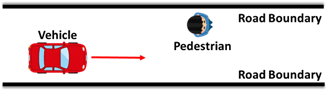
想定される直線単路場面
実験による認識結果
認識結果(シミュレーション)
ポテンシャル法による走行(シミュレーション)