近年,自動運転技術の実用化が進んでおり,将来的に一般道を含めた完全自動運転の実現により,多くの社会的課題の解決が期待されています.自動運転を行うにあたっては,周囲環境の認知や自車位置の推定が重要となります.しかし,一般道や生活道路を含めた完全自動運転の実現にあたり,自車位置の推定には,気象条件などの外部環境に左右されないシステムの構築が重要となってきます.その際に重要となってくるのが,交通情報や経路情報を伴うダイナミックマップです.ダイナミックマップ内にある経路情報に従って走行することにより,自動運転を実現することができます.そうしたダイナミックマップですが,交差点部を中心に,区画線が引いていない箇所において,経路を生成する手法が確立されていません.本研究では,交差点部における経路を梁のたわみ曲線を用いて経路生成を行うことで,対向車線などに干渉せず,人間の運転に近い運転経路の生成を行うことを目標に,研究を行っています.

ダイナミックマップ内の経路イメージ
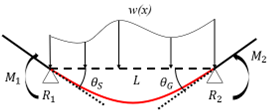
経路生成手法のイメージ
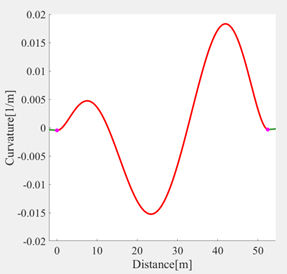
走路長と曲率変化の関係
(ハンドル操作に相当)
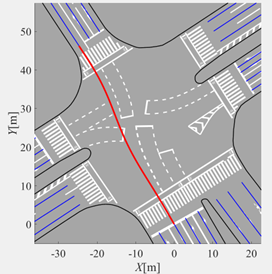
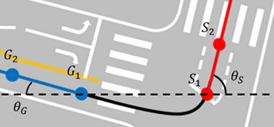
経路生成結果