自動二輪車は趣味の乗り物として,また手軽な交通手段として世界各国で利用されています.これまでの二輪車の研究としてR.S.Sharpによって二輪車の運動力学の基礎が示されました.この研究では二輪車の運動方程式が示されており,車両の横変位,ロール角,ヨー角,ハンドル角の4自由度で構成されています.このとき二輪車の運転手(ライダー)は車体に完全に固定されており,一つの剛体として扱われています.しかし二輪車は四輪の自動車と比較して,運転手の占める質量の割合が大きく,運転手の動きの影響を大きく受けます.特に運転技術としてライダーは自身をロールすることで,二輪車を扱うということが知られています.そこで本研究では,Sharpによって提唱された自動二輪車の運動方程式を基礎として,ライダーにロール方向の自由度を含めた場合の運動力学モデルについて検討を行いました.そのモデルについてハンドルトルクとライダーが腰から発生させるロールモーメントによる制御を行い,一本橋走行時の車両の運動について検証しました.
シミュレーションの様子
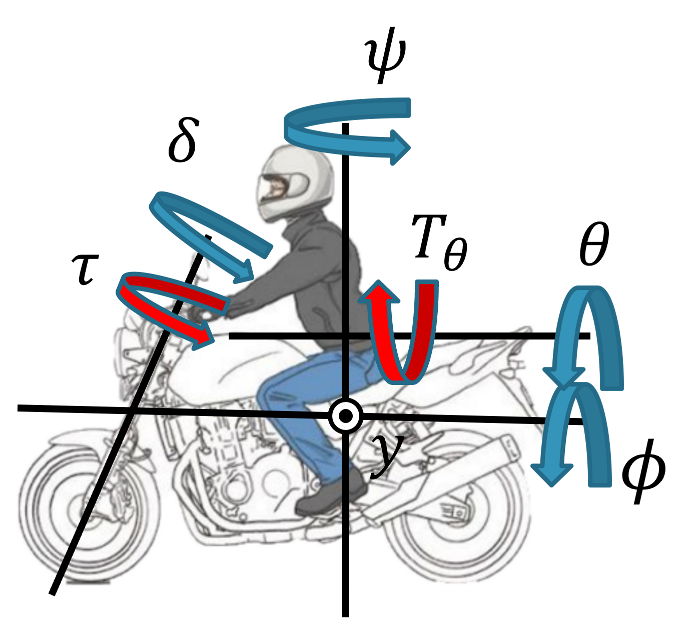
二輪車―ライダーモデル
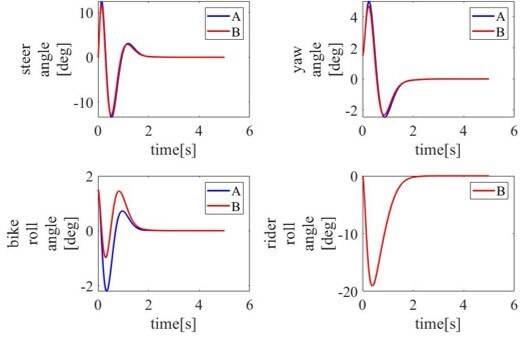
車体角度
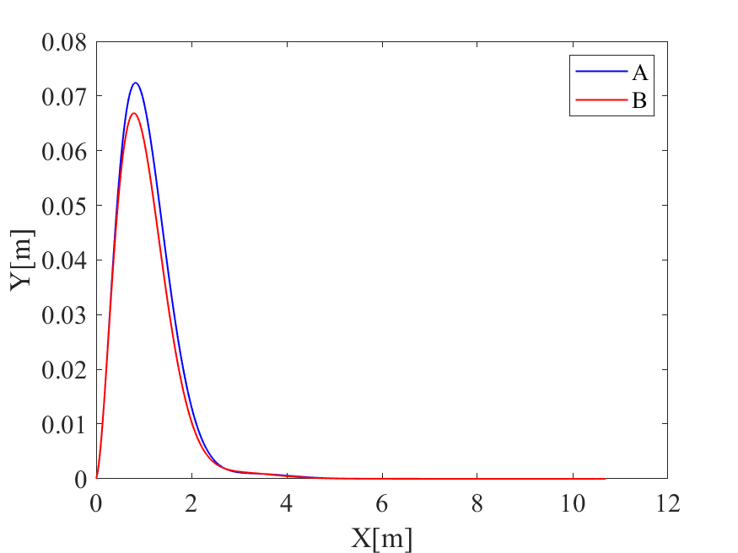
車両軌跡